Rockwell Automation Publication 7000-UM202D-EN-P - May 2018 209
Appendix H
Encoder Use and Torque Capabilities
When to use an Encoder
An encoder is required under any of the following conditions:
• When speed regulation accuracy must be between 0.01…0.02% of
nominal speed.
• When the zero speed breakaway torque needed is greater than 90% of
continuous running torque.
• When continuous running speed is greater than or equal to 0.1 Hz, but
less than 6 Hz.
• For minimizing restart times using the flying start capability in forward
or reverse direction.
• At any time when HPTC is enabled.
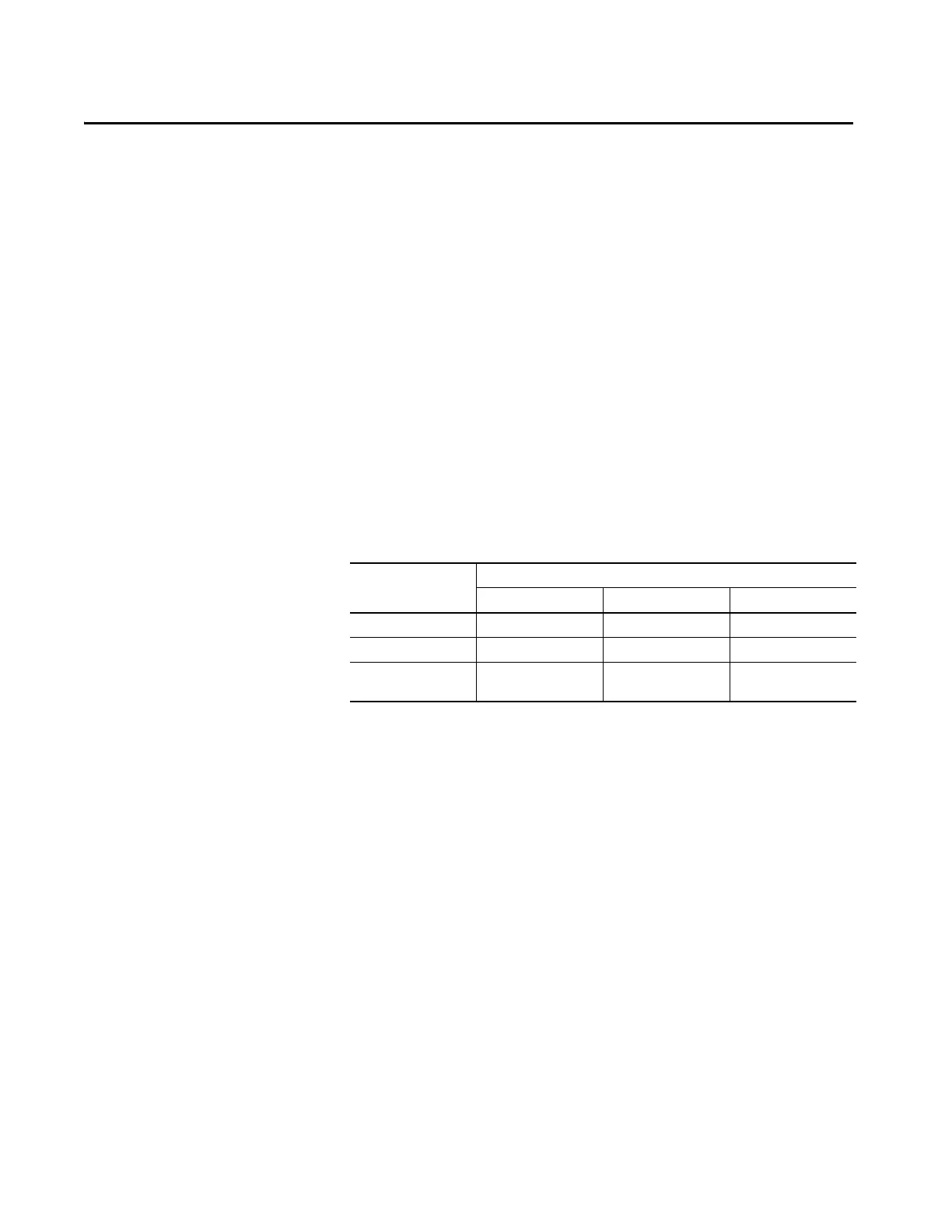
Table 20 - PowerFlex Speed Regulation
Notes:
• Speed regulation is based on a percentage of motor synchronous speed.
• Encoder to be mounted on the AC machine
• Operational 15V DC power supply mounted in drive to power the
Encoder as a standard option with the encoder feedback card.
• You are responsible for providing and mounting of encoder
• Sleeve bearing motors require the encoder to have an axial movement
tolerance.
• Recommended encoders are shaft mounting type, examples are the
Avtron 685 or the NexGen RIM Tach 8500, 12…15V models or
equivalent. Magneto resistive models are more adaptable to harsh
environments.
• If possible, use encoders without Marker, Index, Z, or sig. C signals, as
these are not used on the PowerFlex 7000 drive.
• When installing, the encoder body and electronics must be isolated
from ground (options available from the encoder manufacturer to
accomplish this).
• When cable lengths exceed 305 m (1000 ft) for the Northstar or 610 m
(2000 ft) for the Avtron, consult the factory.
Encoder Frequency Output
<6 Hz 6…15 Hz >15 Hz
Without Encoder Not applicable 0.1% 0.1%
With Encoder 0.02% 0.01% 0.01%
With Encoder and HPTC
mode enabled
0.01% 0.01% 0.01%

 Loading...
Loading...





