210 Rockwell Automation Publication 7000-UM202D-EN-P - May 2018
Appendix H Encoder Use and Torque Capabilities
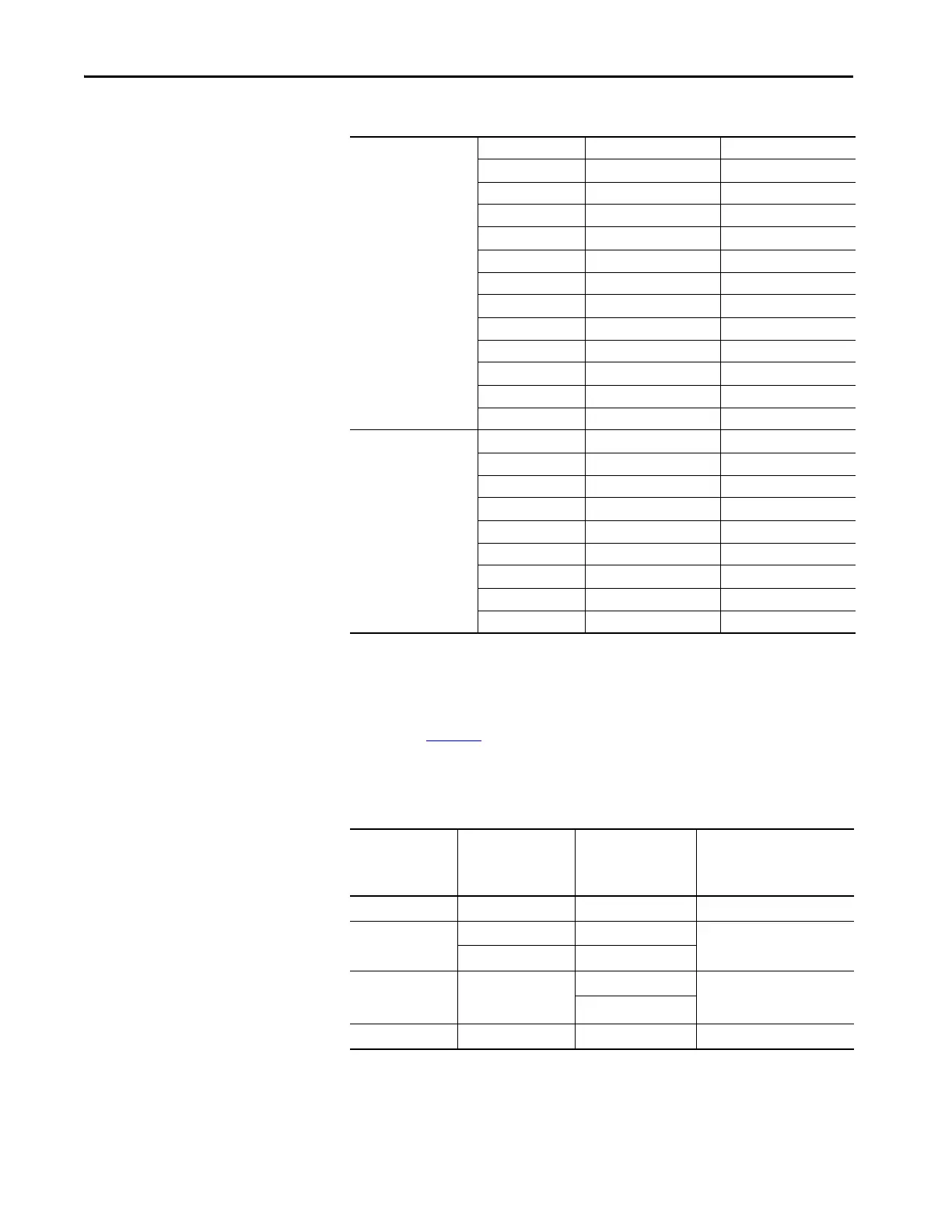
Table 21 - Encoder Selection
PowerFlex 7000 Drive
Performance (Torque
Capabilities)
PowerFlex™ 7000 drives have been tested on a dynamometer to verify
performance under locked rotor, accelerating, and low speed-high torque
conditions. Table 22
shows the PowerFlex 7000 drive torque capabilities as a
percent of motor rated torque, independent of the momentary overload
conditions of the drive.
Table 22 - PowerFlex 7000 Drive Torque Capabilities
HPTC Mode Motor RPM Minimum Tach PPR Recommended Tach PPR
3600 1024 1024
3000 1024 1024
1800 1024 2048
1500 1024 2048
1200 2048 2048
1000 2048 2048
900 2048 4096
720 4096 4096
600 4096 4096
450 4096 8192
360 8192 8192
300 8192 8192
Standard Control Mode 3600 — 600
3000 — 600
1800 — 1024
1500 — 1024
1200 — 2048
1000 — 2048
900 — 2048
720 — 2048
600 — 2048
Parameter Torque Capability
without Encoder (%
of Motor Rated
Torque)
Torque Capability with
Encoder (% of Motor
Rated Torque)
Torque Capability with
Encoder and HPTC
Breakaway Torque 90% 150% 150%
Accelerating Torque
90% (0…8 Hz) 140% (0…8 Hz)
150% (0…75 Hz)
125% (9…75 Hz) 140% (9…75 Hz)
Steady State Torque
(1)
(1) Continuous operating torque required to control the load, without instability.
125% (9…75 Hz)
(3)
100% (1…2 Hz)
150% (0…60 Hz)
(3)
140% (3…60 Hz)
(3)
(3) Drive will require over-sizing to achieve greater than 100% continuous torque.
Max. Torque Limit
(2)
(2) An electronic method of limiting the maximum torque available from the motor. The software in a drive typically sets the torque
limit to 150% of motor rated torque.
150% 150% 150%

 Loading...
Loading...





