T3-B T6-B Manipulator 3. Environments and Installation
52 T-B series Rev.1
3.5 Installation Procedure
The installation shall be made by personnel who has taken robot system training held by us
and suppliers and should conform to all national and local codes.
CAUTION
■
Manipulator must be installed to avoid interference with buildings, structures,
machines and equipment that may create a trapping hazard or pinch
■
the Manipulator in order to secure ventilation around
the air supply/exhaust port.
■
Oscillation (resonance) may
occur during operation depending on rigidity of the
If the oscillation occurs, improve rigidity of the table or change the speed or
acceleration
and deceleration settings.
■
Tab le Top Mounting Manipulator with two or more people.
ts are as follows. Be careful not to get hands, fingers, or
feet caught and/or have equipment damage
d by a fall of the Manipulator.
T3-B401S: approx.14kg: 31lbs.
T6-B602S: approx.21kg: 46lbs.
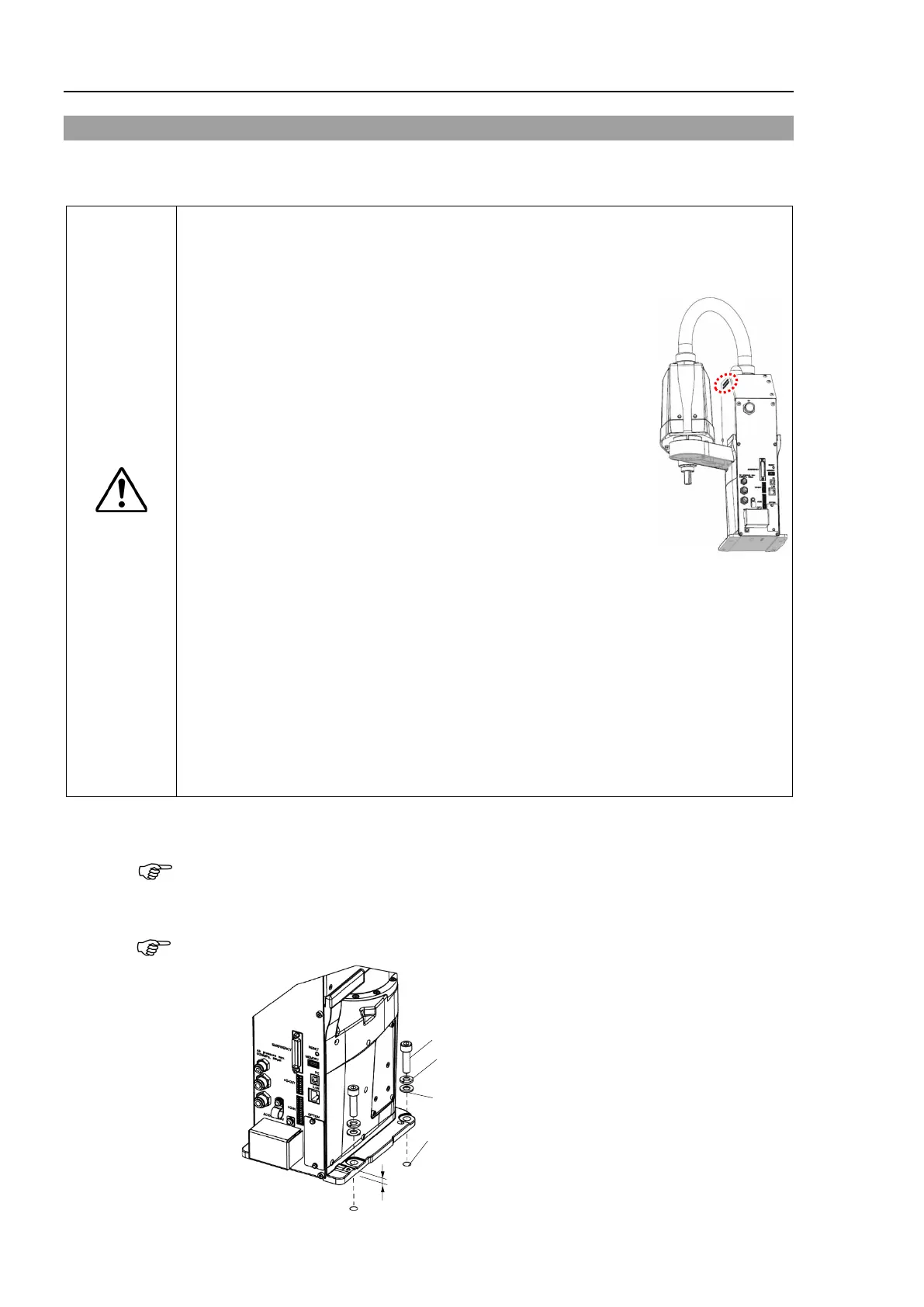
Secure the base to the base table with four bo
lts.
with specifications conforming to ISO898-1 Property Class: 10.9 or 12.9.
Tightening torque: 32.0±1.6 N·m
Make sure to remove wire tie for
mechanical stop protector.
Screw Hole
(depth 20 mm
or more)
 Loading...
Loading...








