T3-B T6-B Manipulator 5. Motion Range
78 T-B series Rev.1
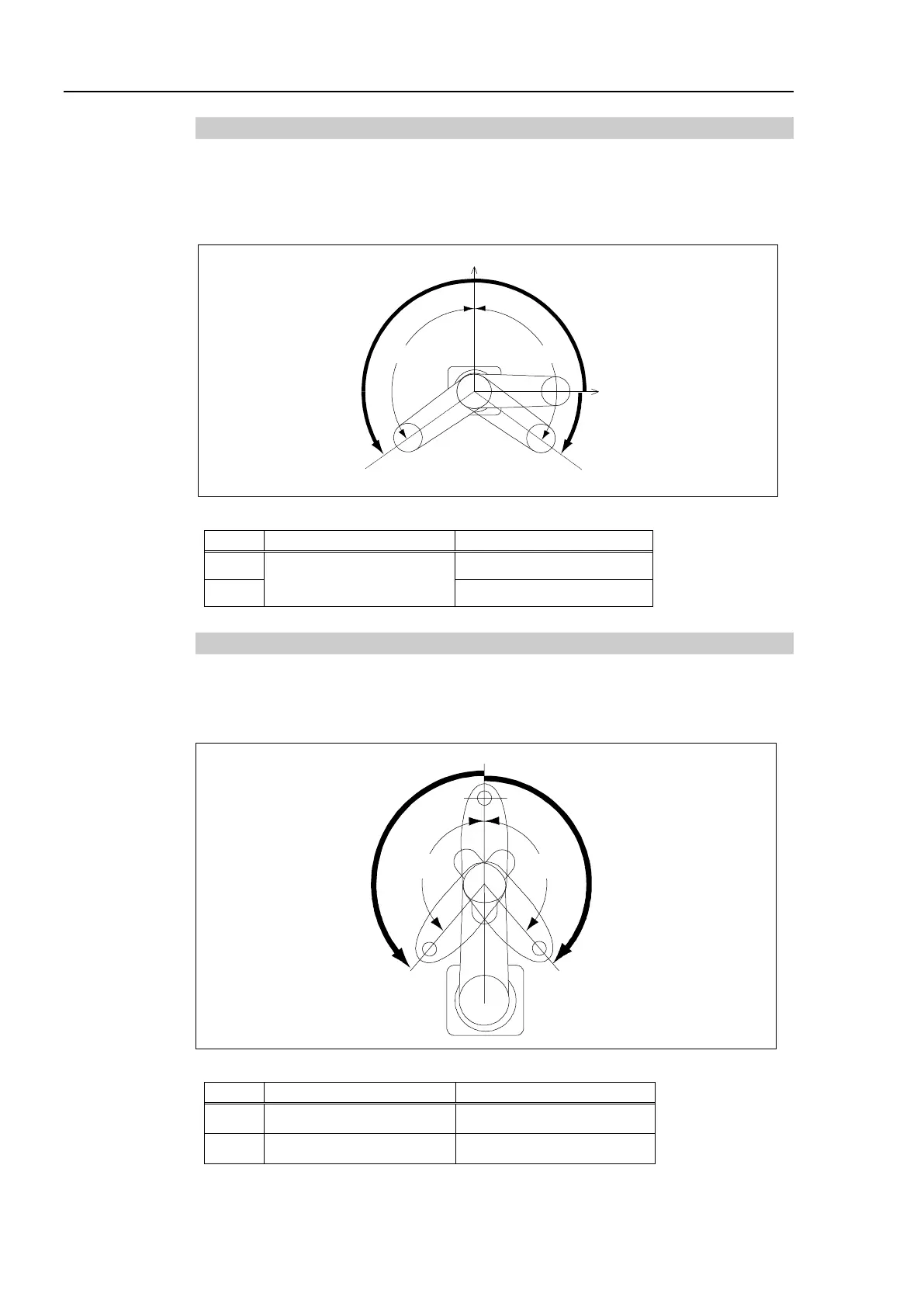
5.1.1 Max. Pulse Range of Joint #1
The 0 (zero) pulse position of Joint #1 is the position where Arm #1 faces toward the positive
(+) direction on the X-coordinate axis.
When the 0 pulse is a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (-).
T3-B
± 132°
− 95574 to 505174 pulse
T6-B
−152918 to 808278 pulse
5.1.2 Max. Pulse Range of Joint #2
The 0 (zero) pulse position of Joint #2 is the position where Arm #2 is in-line with Arm #1.
With the 0 pulse as a starting point, the counterclockwise pulse value is defined as the
positive (+) and the clockwise pulse value is defined as the negative (-).
T3-B
± 141° ± 320854 pulse
T6-B
± 150° ± 341334 pulse
 Loading...
Loading...








