2. Installation
Safety and Installation (T, VT / EPSON RC+ 7.0) Rev.15 53
: When mounting Manipulator on the mobile platform, there is a risk that
Manipulator falls over. Be careful for the following items and take
measures to prevent falls.
Stiffness of the connection between mobile platform and Manipulator
Acceleration/deceleration of mobile platform and Manipulator
Motion range of Manipulator
: Be sure to design the mounting position of Manipulator so that the center
of gravity is always within the mobile platform when Manipulator grasps
a workpiece by using a tool. For operation pose, create operation
program so that the center of gravity of Manipulator is always within the
mobile platform. If the center of gravity is not within the mobile
flatform, Manipulator may fall over.
Risk assessment and Safety measures
: This Manipulator is not a collaborative robot. Be sure to perform risk
assessment and take safety measures such as safeguard and emergency
stop switch.
Operating Manipulator without taking safety measures is extremely
hazardous, may result in serious bodily injury and/or severe equipment
damage to the robot system, and may cause serious safety problems.
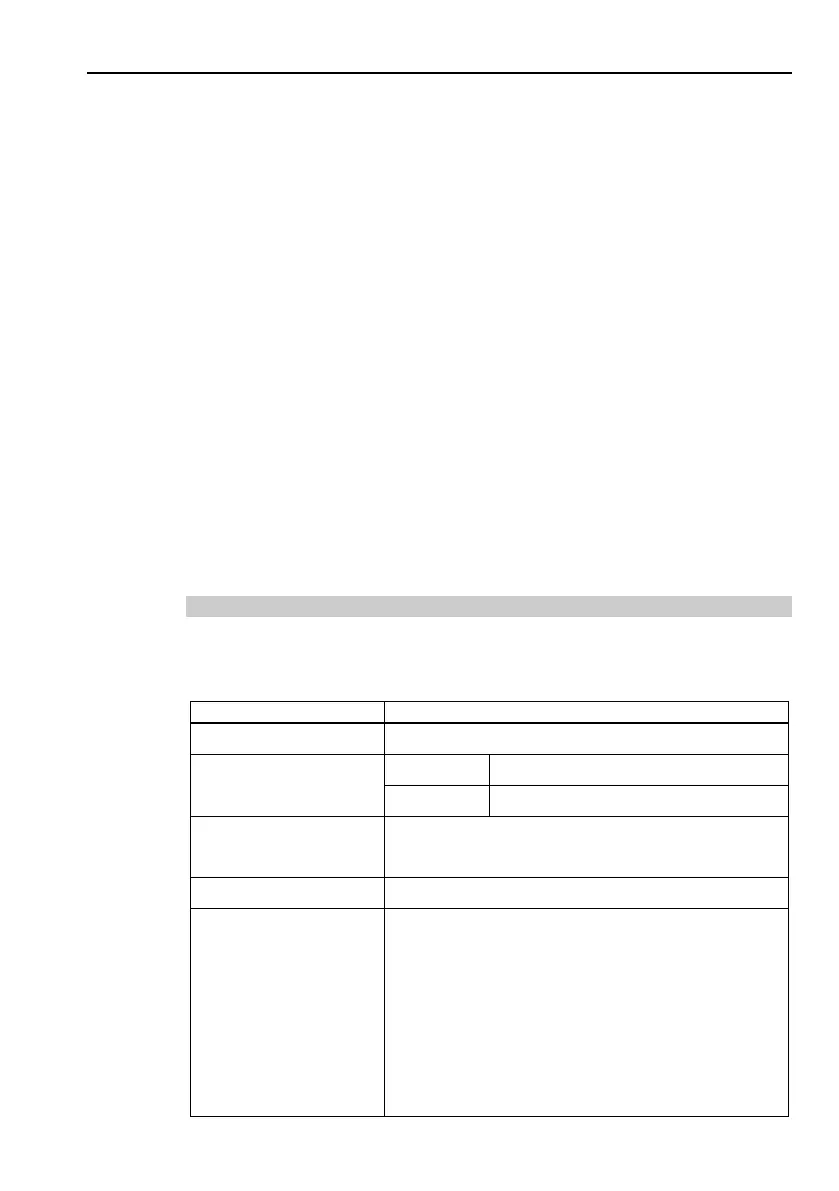
2.4.2 Environment
A suitable environment is necessary for the robot system to function properly and
safely. Be sure to install the robot system in an environment that meets the
following conditions:
°
C (with minimum temperature variation)
Ambient relative
20 ~ 80% (no condensation)
10 ~ 80% (no condensation)
First transient burst
2 kV or less (Power supply wire)
1 kV or less (Signal wire)
Environment
- Keep away from direct sunlight.
- Keep away from dust, oily smoke, salinity, metal
powder or other contaminants.
- Keep away from flammable or corrosive solvents
and gases.
- Keep away from water.
- Keep away from shocks or vibrations.
- Keep away from sources of electric noise.
- Keep away from strong electric or magnetic fields.
 Loading...
Loading...







