82
APT4000PH
P controller
Application in integrating systems
(e.g. closed tank, batch processes).
PI controller
Application in non-integrating systems
(e.g. drains).
PID controller
The additional derivative action compensates for measurement
peaks.
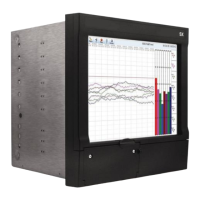
Controller characteristic
Controller functions
PID controller
Setpoint
Controller output Y
P
[%]
+100 %
-100 %
[pH]
Neutral zone Y
P
=0
83
Controller equations
Controller output Y = Y
P
+ Y
P
dt + T
D
I action
D action
dY
P
dt
1
T
R
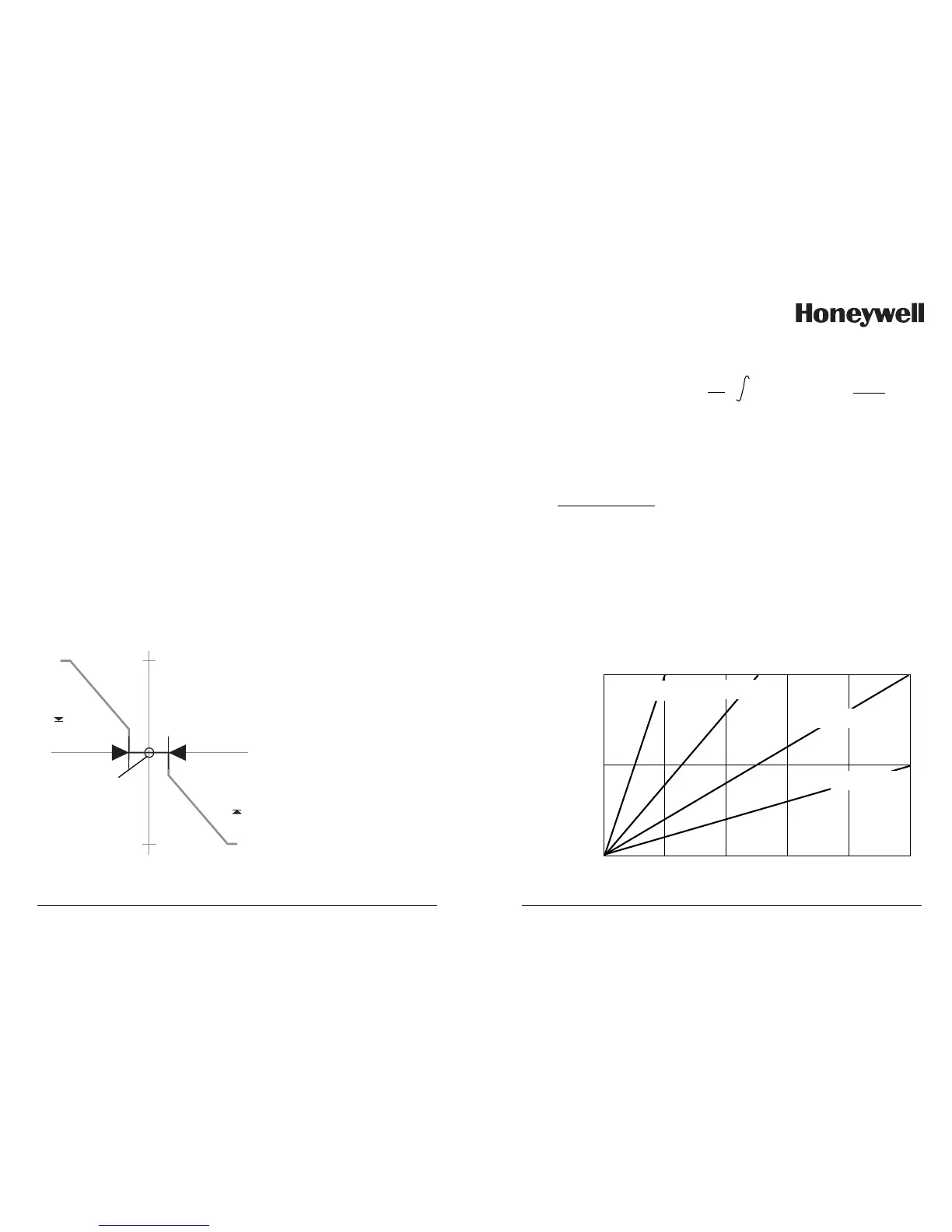
P-action
Proportional action Y
P
Setpoint - Meas. value
Constant
Y
P
=
*
K
C
with:
Y
P
Proportional action
T
R
Reset time [s]
T
D
Rate time [s]
K
C
Controller gain [%]
Constant 5 (for pH)
500 mV (for ORP)
100 %
50 %
X
w
(Process variables: pH / (mV))
Controller
output Y
K
C
= 500
%
K
C
= 200 %
K
C
= 100 %
K
C
= 50 %
1 / (100) 2 / (200)
3 / (300)
4 / (400)
5 / (500)
Proportional action (Gradient K
C
[%])
Deviation
Neutral zone (Y=0)
Tolerated deviation from setpoint.
The setting “1pH”, for example, permits a deviation of ± 0.5 pH
from the desired value without activating the controller.

 Loading...
Loading...