21
INOVANCE TECHNOLGY EUROPE GmbH
SV660N Startup Procedure_EN_v1.4_20220826.docx
6.6 GAIN TUNING
Set the gain parameters of the servo drive to proper values so that the servo drive can drive the motor as fast
and accurate as possible based on internal references or commands sent from the host controller.
The gain is defined by the combination of multiple mutually-affected parameters (including position loop gain,
speed loop gain, filter and inertia ratio). Set these parameters to proper values to keep a balanced
performance.
NOTE Before gain tuning, perform a trial run through jogging to ensure the motor operates properly.
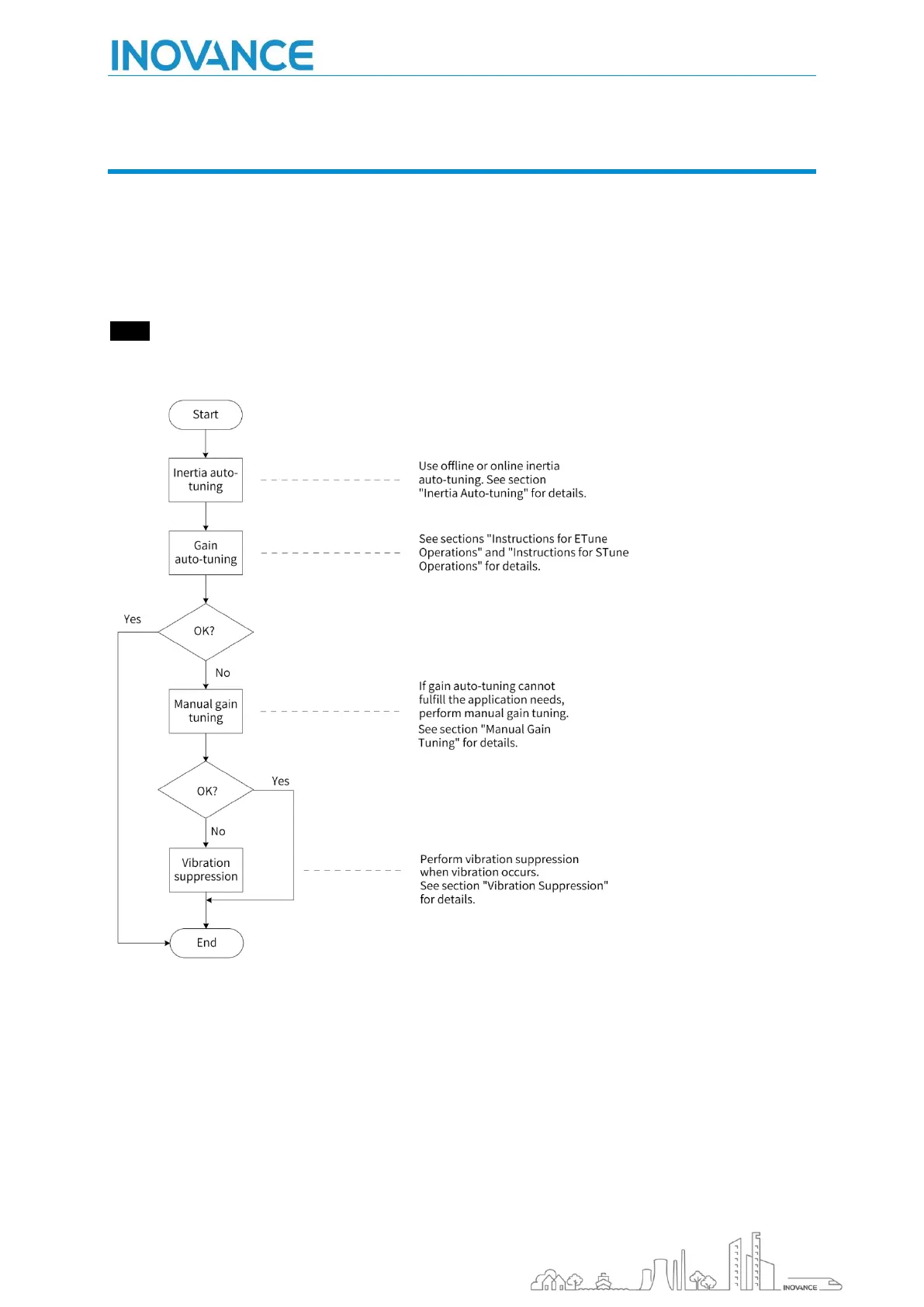
The following figure shows the general procedure for gain tuning.

 Loading...
Loading...




