19
INOVANCE TECHNOLGY EUROPE GmbH
SV660N Startup Procedure_EN_v1.4_20220826.docx
6.6.8 MODEL TRACKING FUNCTION
The model tracking function, which is only available in the position control mode, can be used to improve the
responsiveness and shorten the positioning time.
Parameters used by model tracking are normally set automatically through STune or ETune along with the gain
parameters.
However, manual tuning could be needed. Model tracking function is based on system ideal mathematical
model, it is as a “Feed-forward Controller+ Filter”.
Normally, this function is applied to point-to-point quick positioning mode (H09-00=6).
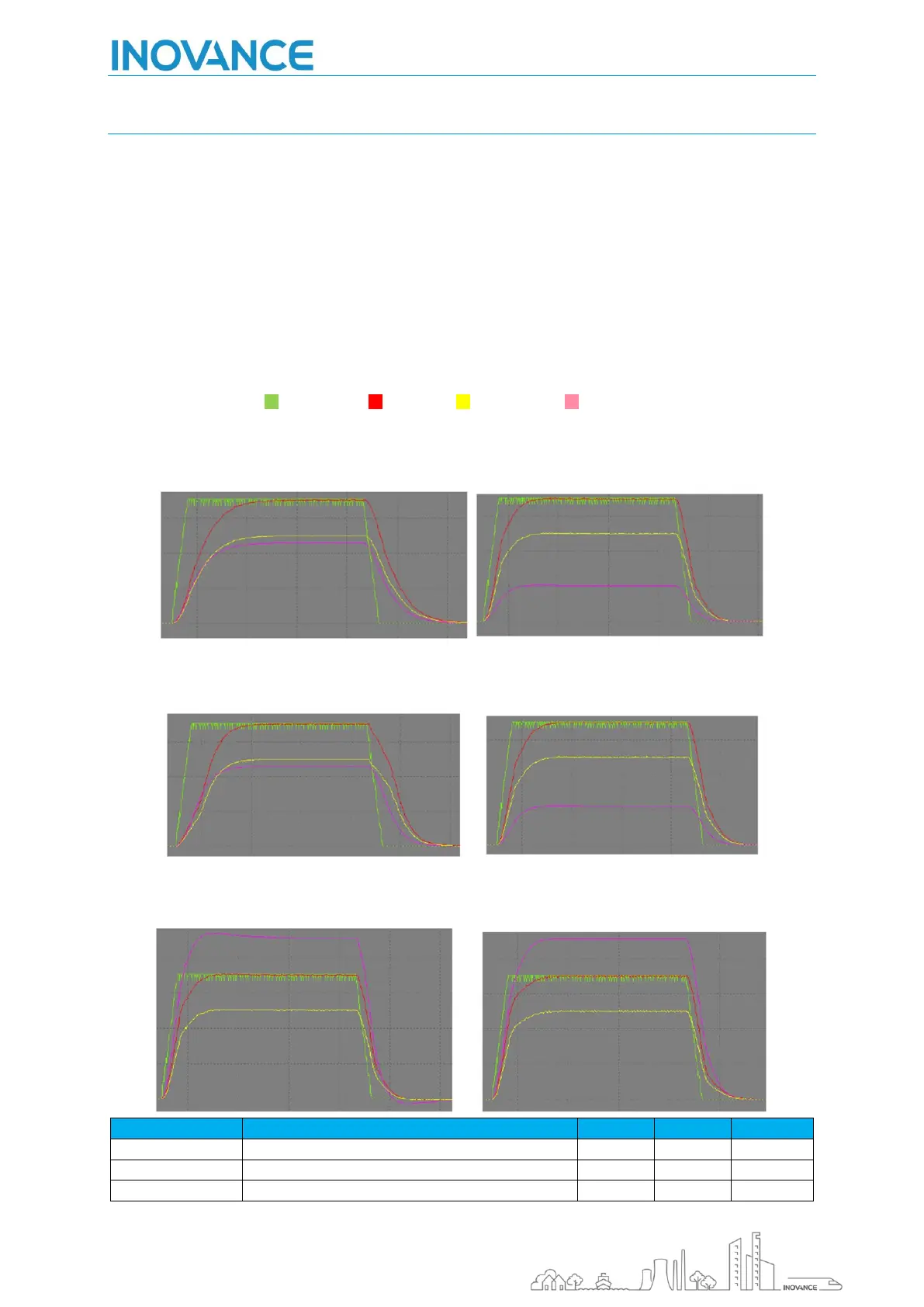
The effect of relevant parameters:
Reference speed Actual speed Position feedback Following error
H08-43: Model Gain (as below curves, increasing H08-43 from 75 to 175, the speed response becomes more
close to reference)
H08-46: Model feedforward (as below curves, increasing H08-46 from 1% to 90%, it can effectively shorten the
positioning time)
H08-51: Model filter time 2 (as below curves, increasing H08-51 from 0 to 0.5ms, it can effectively reduce
overshoot caused by too strong feedforward)

 Loading...
Loading...




