49
INOVANCE TECHNOLGY EUROPE GmbH
SV660N Startup Procedure_EN_v1.4_20220826.docx
9.3 POSITION REFERENCE FILTER
This function filters the position references divided or multiplied by the electronic gear ratio. It involves the
first-order filter and moving average filter.
The next two parameters explain the reference position filter:
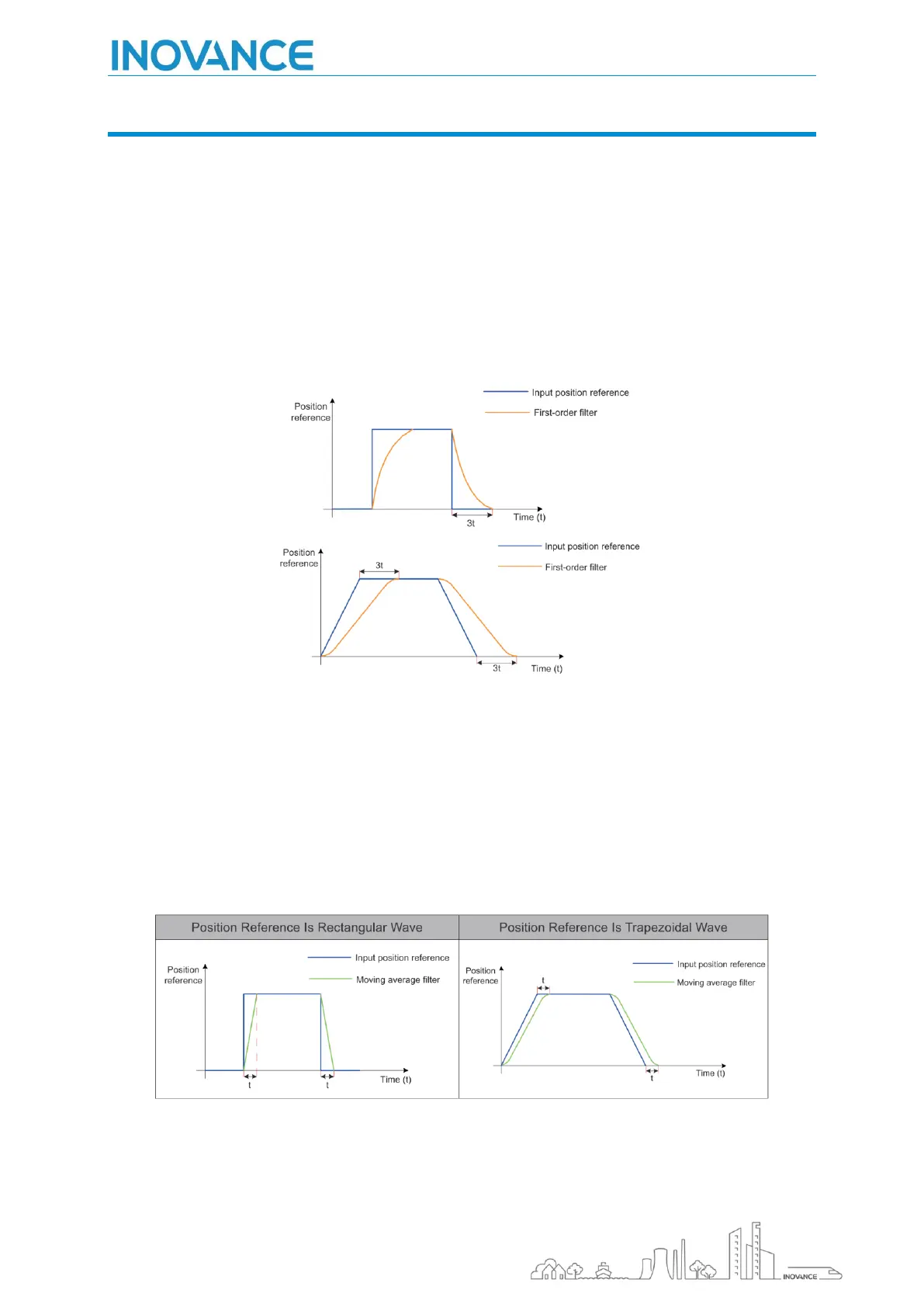
H05-04 First-order low-past filter time constant
It sets the time constant of first-order low-pass filter for position reference (encoder unit).
If position reference P is rectangular wave or trapezoidal wave, the position reference after first-order low-pass
filter is as follows:
This function has no effect on displacement (position reference sum).
Too large setting of this parameter will cause an increase in response delay. Set this parameter correctly
according to actual condition.
H05-05 Moving average filter time constant 1
It sets the time constant of moving average filter for position references (encoder unit). If position reference
P is rectangular wave or trapezoidal wave, the position reference after filter of average value is as follows:
This function has no effect on displacement (position reference sum). Too large setting of this parameter will
cause an increase in response delay. Set this parameter correctly according to actual conditions.

 Loading...
Loading...




