6.8.1 ETHERCAT POSITION INTERPOLATION
In CSP mode, the servo drive operates as a position-follower with current/velocity/position loops closed in the
drive. The EtherCAT master does all of the calculations to produce motion profiles that move the motor to
desired positions.
The servo drive only sees increments of position with every PDO (CiA402 object 607Ah) and has no knowledge
of the final target position or velocities. And the rate at which the updates arrive depends on the time-base of
the master (EtherCAT cycle time).
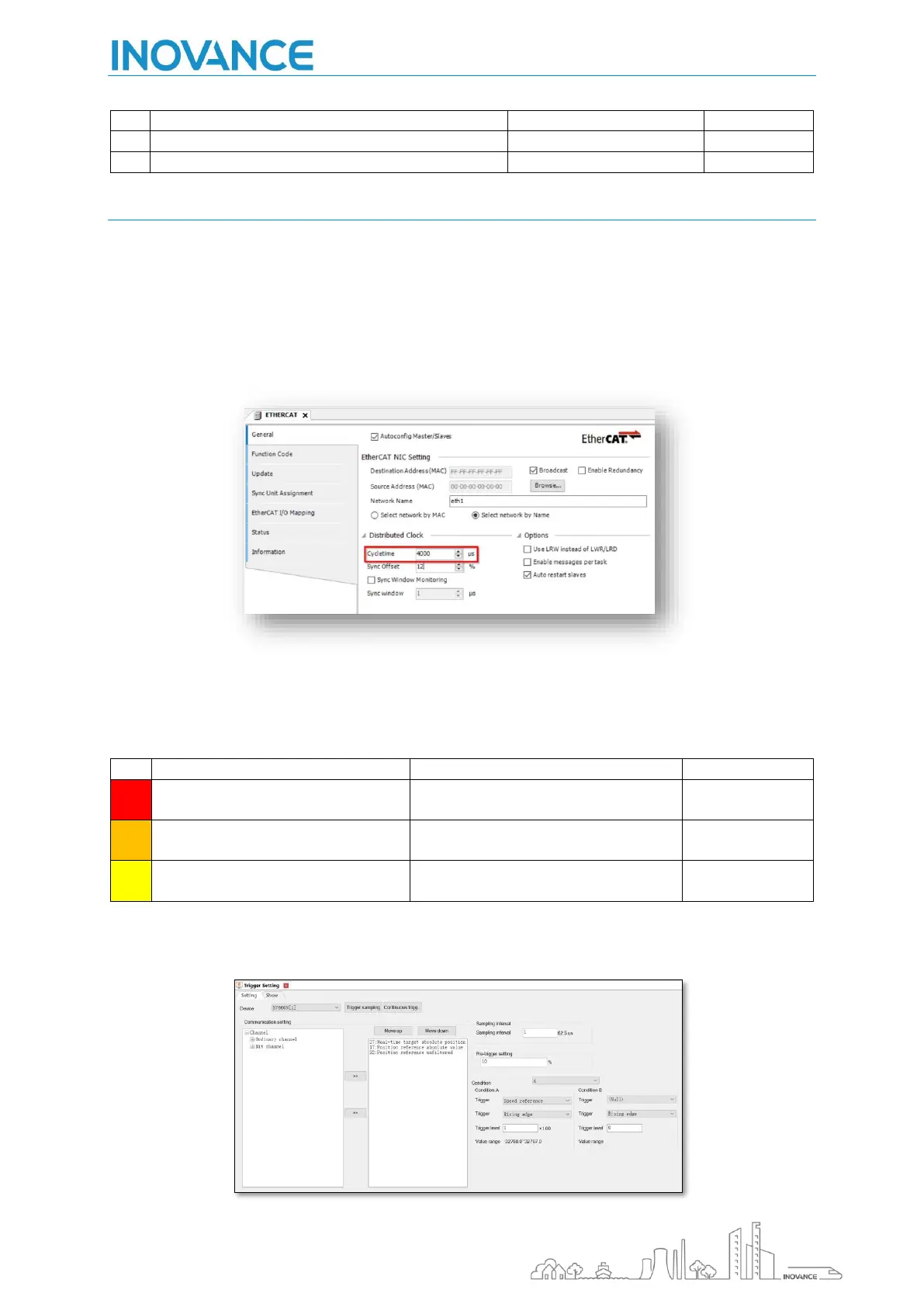
The next two graphs show the difference between a 4ms and an 8ms EtherCAT cycle. The waveform signal
shows the position sent by the EtherCAT master each cycle and the orange waveform is the position
interpolated between two points received each cycle from EtherCAT. The drive uses the value of the orange
waveform to introduce it as a reference in the position loop.
Trigger configuration:

 Loading...
Loading...




