SV-DA200 series AC servo drives Faults and solutions
‐161‐
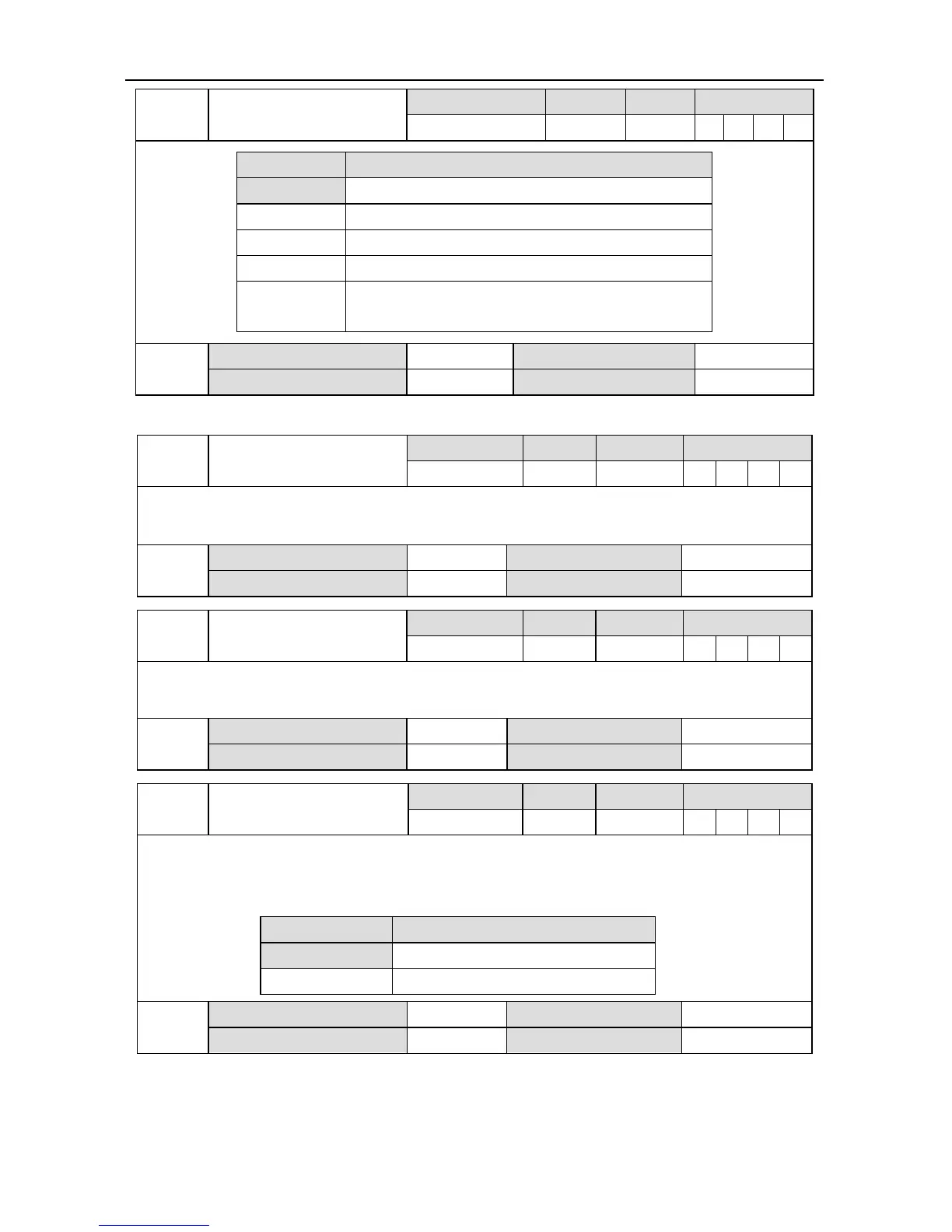
P5.74 Digital output mode of PTP
Setting range Default Unit Available mode
0~4 0 - P
Setting value Function
[0] Output before PTP arrival
1 Output after PTP arrival
2 Single point output+output before PTP arrival
3 Single point output+output after PTP arrival
4
Single point output+output after PTP arrival
(support the control word in absolute position only)
P5.74
Data size 16bit Data format DEC
Modbus address 2148, 2149 CANopen address 0x254A, 0x00
6.7 Application function (P6)
P6.00 Forward low JOG speed
Setting range Default Unit Available mode
0~6000 5 r/min P
This parameter is used to set the speed of slow forward jogging which is triggered by forward
jogging terminal and switching terminal of high-low jogging speed.
P6.00
Data size 16bit Data format DEC
Modbus address 2200, 2201 CANopen address 0x2600, 0x00
P6.01 Reverse low JOG speed
Setting range Default Unit Available mode
-6000~0 -5 r/min P
This parameter is used to set the speed of slow reverse jogging which is triggered by reverse
jogging terminal and switching terminal of high-low jogging speed.
P6.01
Data size 16bit Data format DEC
Modbus address 2202, 2203 CANopen address 0x2601, 0x00
P6.02
1
Position latch function
switch
Setting range Default Unit Available mode
0~1 0 - P
Position latch function switch can be set via this parameter. After this function is enabled, the
position information will be saved in EEPROM after each terminal latch, however, too frequent
saving operation may damage the EEPROM.
Setting value Function
[0] Disabled
1 Enabled
P6.02
1
Data size 16bit Data format DEC
Modbus address 2204, 2205 CANopen address 0x2602, 0x00

 Loading...
Loading...