SV-DA200 series AC servo drives Faults and solutions
‐82‐
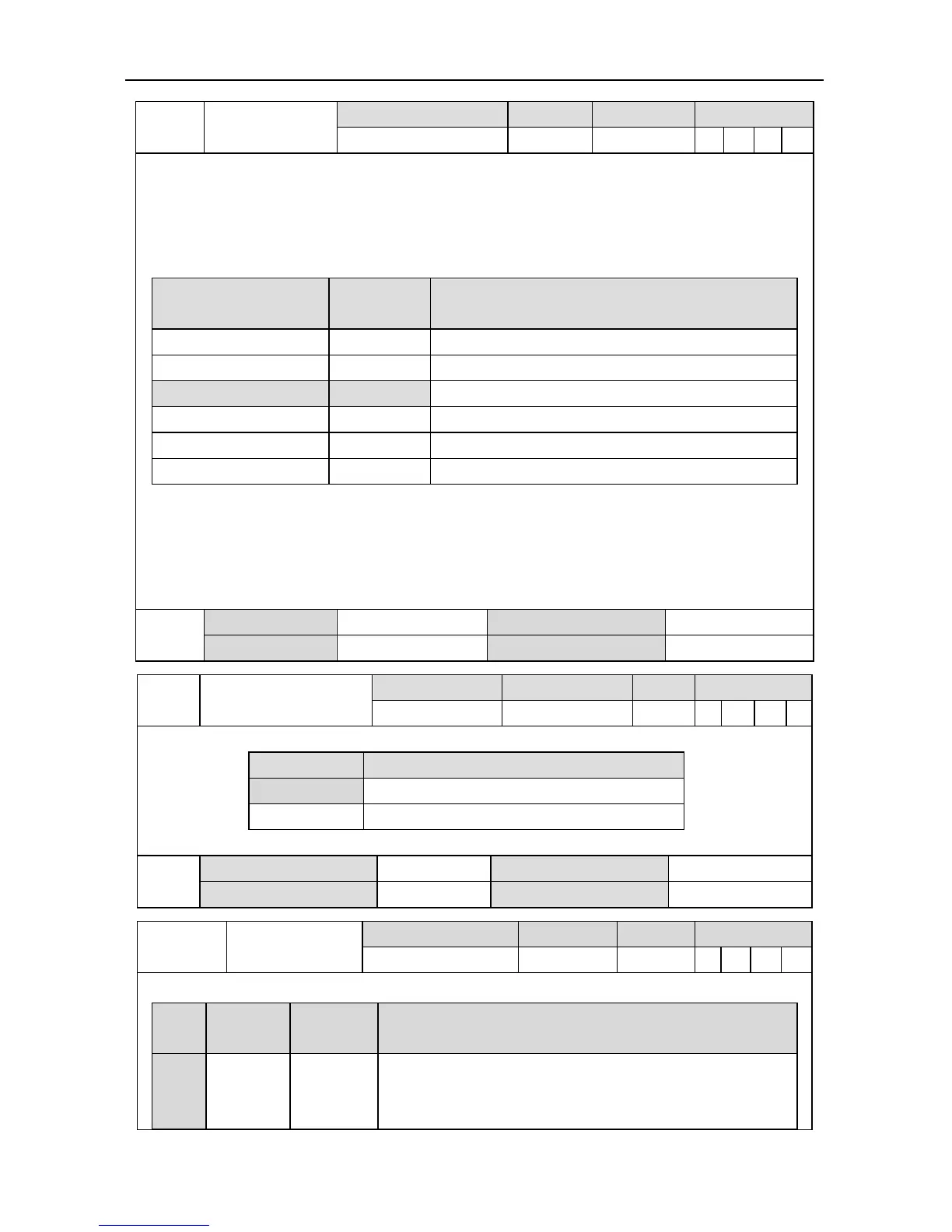
P0.01
1
Encoder type
Setting range Default Unit Available mode
1~12 4*
1
- PSTF
Generally, the system will set this parameter automatically after P0.00 is set correctly. In cases
where encoder disconnection fault is reported during power up when motor is connected
correctly, please check whether the drive supports motor encoder type, refer to chapter 1.1.3. The
naming of servo motor contains encoder type, refer to chapter 1.2.2.
Relation between encoder type and P0.01 setting value:
Motor nameplate
Encoder type*
2
Setting value Meaning
1 1 2500-PPR standard incremental
3 3 17-bit single-turn absolute value
4 [4] 17-bit multi-turn absolute value *
3
7 8 Rotary transformer
9 10 23-bit multi-turn absolute value *
3
- Other value Reserved
*
1
Different motors correspond to different types of encoders.
*
2
Refer to chapter 1.2.2 ⑧.
*
3
When the multi-turn encoders are used, it is necessary to change the battery when the drive is
power on to prevent losing absolute position. The standard battery is 2000mAh and the
replacement cycle is 1.5~2 years.
P0.01
1
Data size 16bit Data format DEC
Modbus address 1002,1003 CANopen address 0x2001, 0x00
P0.02
1
Forward rotation of
motor *
1
Setting range Default value Unit Available mode
0~1 0 - P S T F
Set the forward rotation of motor:
Setting value Definition
[0] Anticlockwise is forward rotation
1 Clockwise is forward rotation
*
1
Definition of forward rotation of motor. The view angle faces shaft output direction of motor.
P0.02
1
Data size 16bit Data format DEC
Modbus address 1004, 1005 CANopen address 0x2002, 0x00
P0.03
1
Control mode
selection
Setting range Default Unit Available mode
0~9 0 - P S T F
This parameter can be used to set the operating mode of the system:
Setting
value
1
st
working
mode
2
nd
working
mode
Instruction
[0] P
/
Position mode: Control the angular displacement of servo
motor via internal/external position command, thus
achieving controlling over mechanical motion displacement.

 Loading...
Loading...