WARNING
The stopping time and distance, or angle, of a robot joint from initiation of a stop sig-
nal is not negligible and must be taken into account when designing and applying
safeguarding devices.
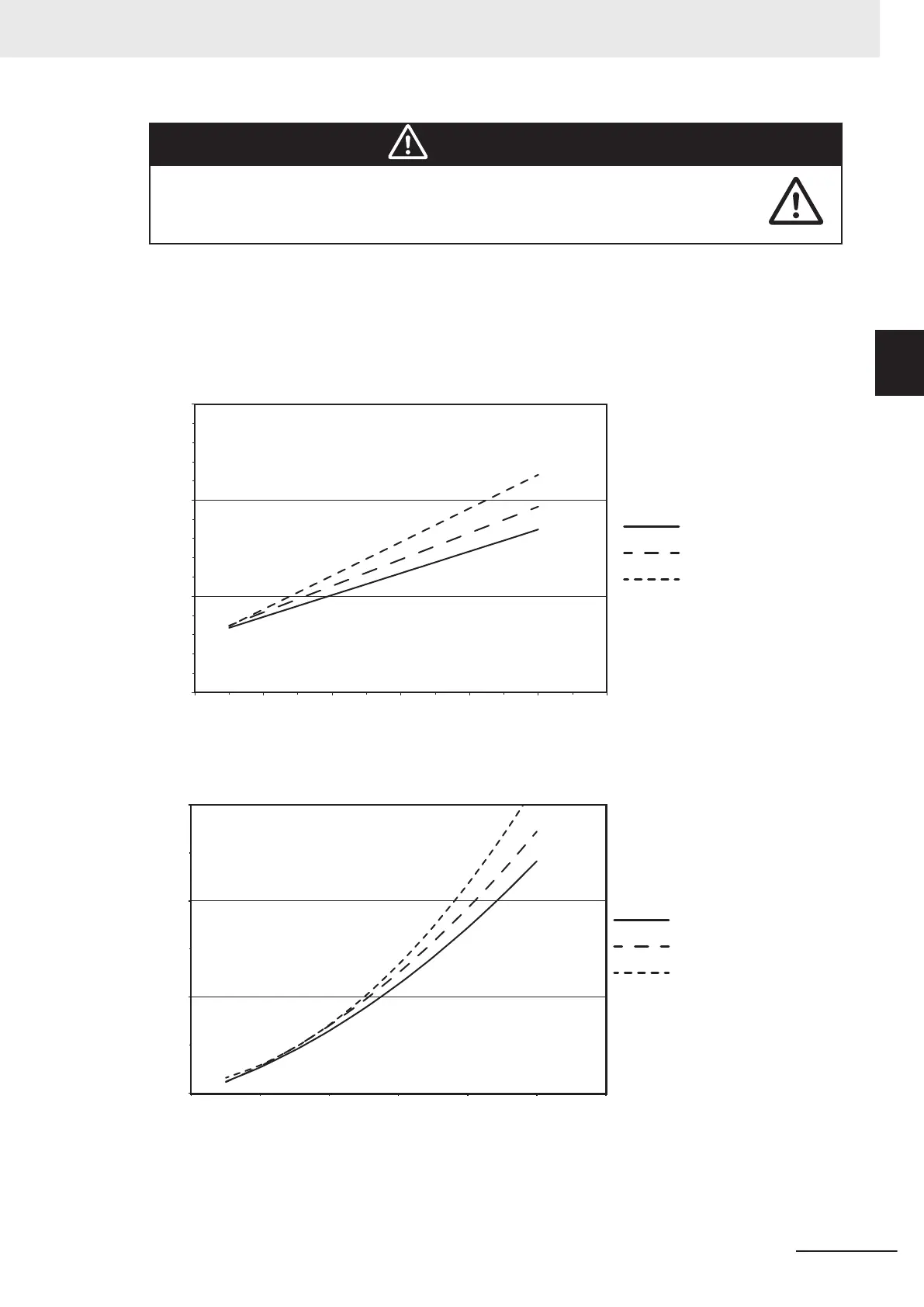
The graphs show the time elapsed and distances traveled between the initiation of a stop signal and
the cessation of all robot motion.
For stop category 1, the stopping time and distance values depend on the speed, load, and extension
of the robot, stated for 33%, 66% and 100% of the maximum payload (5 kg). Data provided is for the
three joints of greatest displacement (J1, J2, and J3).
0
0.1
0.2
0.3
0 20 40 60 80 100 120
1.6 kg
3.3 kg
5.0 kg
Stopping Time (s)
Speed (%)
Joint 1 Stopping Time
0
20
40
60
0 20 40 60 80 100 120
Joint 1 Stopping Distance
1.6 kg
3.3 kg
5.0 kg
Speed (%)
Stopping Distance (degrees)
2 Specifications
2-9
i4L Robots User's Manual (I658)
2-2 Performance Specifications
2
2-2-2 Stopping Distances and Times
 Loading...
Loading...





