2-5
Other Specifications
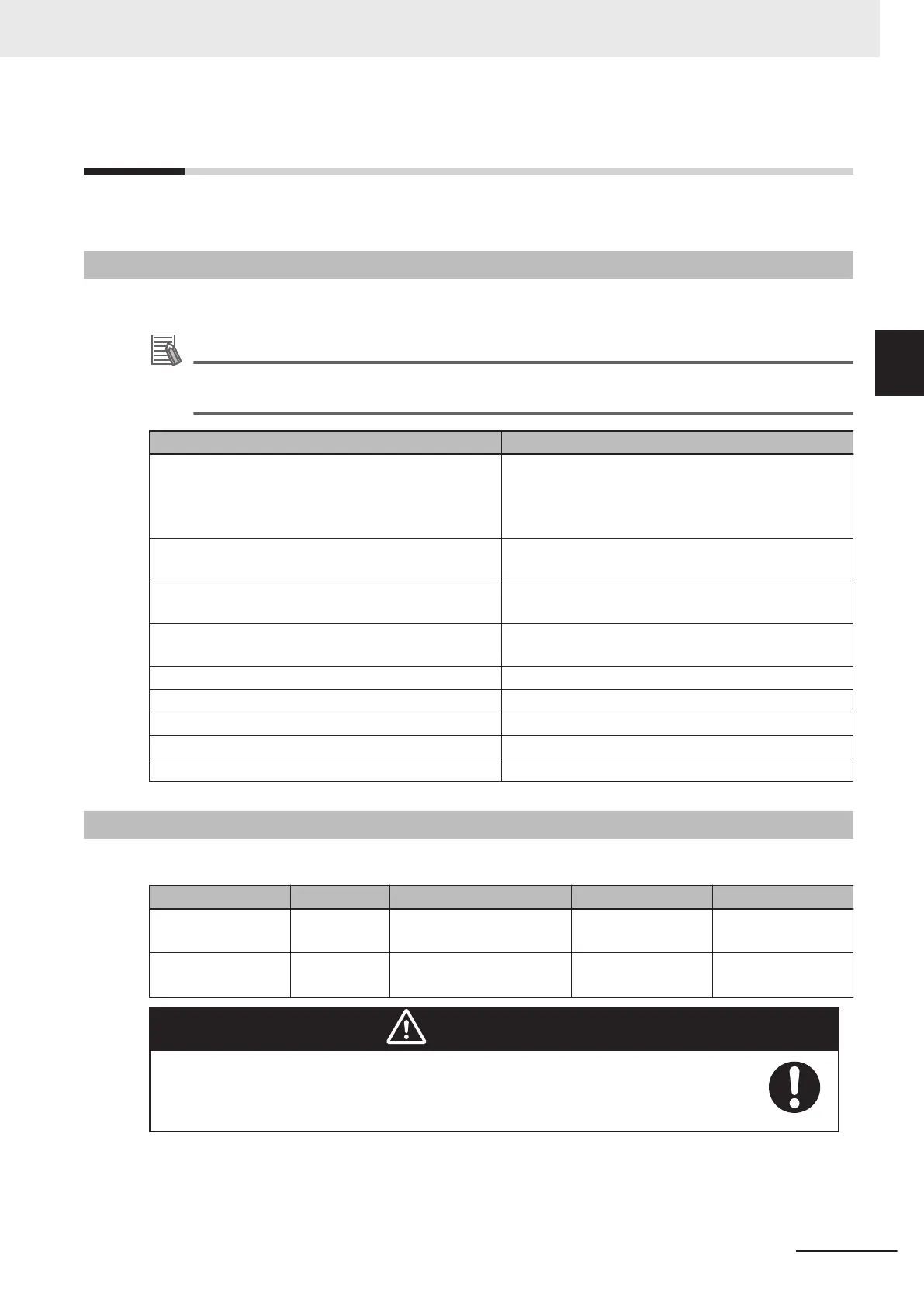
Other specifications for associated equipment are provided below.
2-5-1
Connector and Port Specifications
Robot connector specifications are provided below.
Additional Information
Refer to Section 3 Installation on page 3-1 for more information about connector wiring and
pin diagrams.
Connector Specification
Pneumatic pass-through ports Push-connect type fittings with a maximum air pres-
sure of 0.55 MPa
• Port A and B fittings: 6 mm
• Port C fitting: 4 mm
USER connectors 15 pin, D-sub, male
Rated current: 3 A
Control Power connector Molex 2-wire receptacle
Part number: 43160-2102
High Power connector Molex 3-wire receptacle
Part number: 43160-2103
XSYSTEM connector 44 pin, D-sub HD, female
XBELTIO connector 26 pin, D-sub HD, male
XIO connector 26 pin, D-sub HD, female
Ethernet interface port RJ-45
TIO connector 15 pin, D-sub, female
2-5-2
Mounting Hardware and Torques
The following bolt types, washers, and torque is required for mounting the robot.
Type Quantity Size Class Torque
Socket Head Cap
Screw
4
• M8 x 1.25 mm
• DIN 912 or ISO 4782
10.9 or 12.9 30-32 N-m
Flat Washer 4
• M8
• DIN 125 or ISO 7089
8.8 –-
WARNING
The robot's center of mass can cause the robot to fall over if the robot is not properly
secured with the mounting bolts.
2 Specifications
2-15
i4L Robots User's Manual (I658)
2-5 Other Specifications
2
2-5-1 Connector and Port Specifications
 Loading...
Loading...





