3-5
Adjustable Hardstops
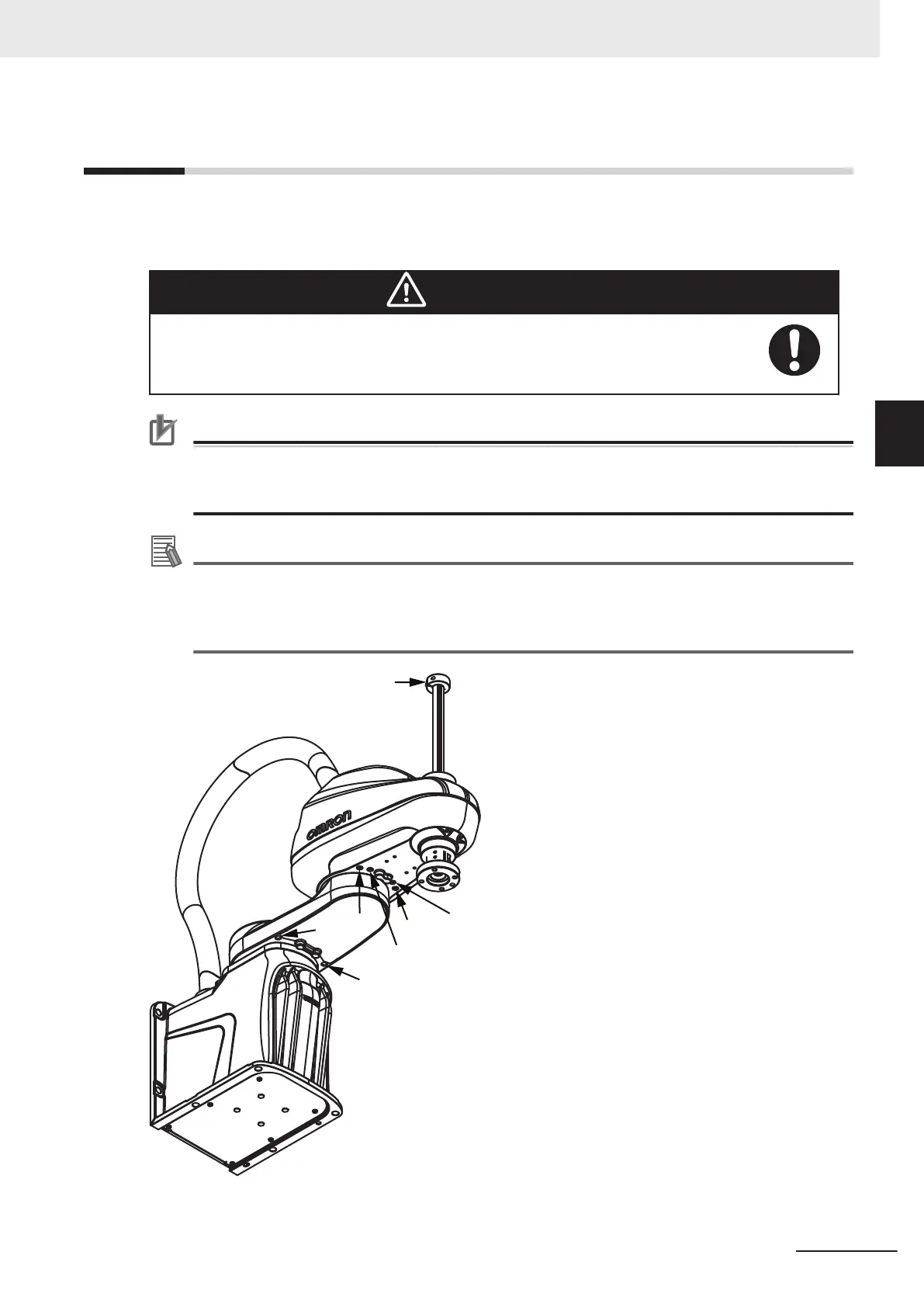
The robot is equipped with several mechanical hardstop adjustment points for joints 1, 2, and 3 as de-
scribed in the following sections. Adjust these mechanical hardstops to restrict the robot's range of
motion in order to prevent collisions within the workspace if necessary.
WARNING
The robot's physical hardstop devices are not intended to withstand repeated use and
if this occurs, the hardstop may become damaged. Implement proper programming
and configuration of joint range limits to prevent hardstop impacts.
Precautions for Correct Use
Always reduce joint motion limits with software configuration settings when hardstops are used
to restrict range of motion. Refer to the Automation Control Environment (ACE) Version 4
User's Manual (Cat. No. I633) for more information.
Additional Information
• Obstacle avoidance functions are also available through software configuration. Refer to the
Automation Control Environment (ACE) Version 4 User's Manual (Cat. No. I633) for more in-
formation.
• Refer to 2-1-5 Robot Work Envelope Dimensions on page 2-6 for full range of motion values.
3 Installation
3-7
i4L Robots User's Manual (I658)
3-5 Adjustable Hardstops
3
3-5-1 Joint 1 Adjustable Hardstops
 Loading...
Loading...





