4-5
CHAPTER 4 Adjustment
3-2 Machine reference
The X series position detectors are resolvers that have four positions where
absolute reset can be performed per motor revolution. If the sensor method is
used for the absolute reset, the origin position will be set at the positions where
absolute reset can be performed soon after the origin sensor reacts to the dog
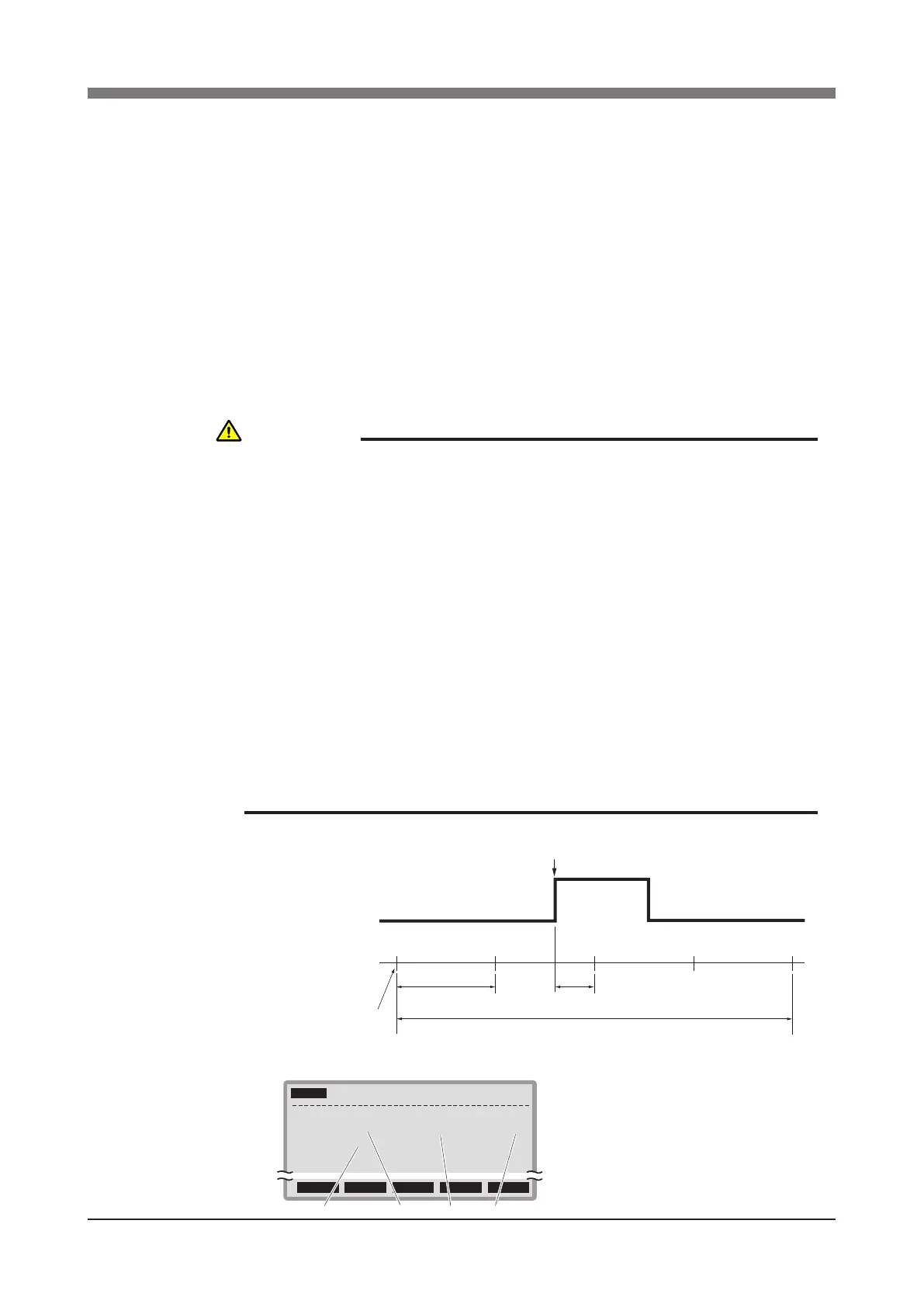
(the origin signal is detected). The machine reference means the position rela-
tionship of the position where the robot detects the origin signal to the position
where the absolute reset can be performed soon after detection. (See Fig. 4-1.)
The machine reference is expressed with the ratio of interval A to interval B
shown in Fig. 4-1. Interval A is the minimum distance between the positions
where absolute reset can be performed and interval B is the distance between
the position where the origin signal is detected and the position where absolute
reset can be performed soon after the origin signal detection.
The machine ref-
erence value is displayed on the optional
PB
screen. (Unit: %)
Machine reference value = B/A × 100(%)
Machine reference
Origin signal detection
Origin signal
Resolver
Positions where absolute reset
can be performed
One motor revolution
BA
ON
OFF
Machine reference display
MANUAL 50% [ S0H0]
Machine reference ( %)
M1= 51 M2= 57 M3= 51
M4= 52
POINT ORIGIN VEL+ VEL−
R-axis X-axis Y-axis Z-axis
Fig. 4-1
CAUTION
THE MACHINE REFERENCE MUST BE ADJUSTED WITHIN A SPECIFIED
RANGE TO KEEP THE REPEATABILITY PRECISION OF THE ABSOLUTE
RESET POSITION. (THE MACHINE REFERENCE IS FACTORY-ADJUSTED
PRIOR TO SHIPPING.) IF THE ORIGIN POSITION IS CHANGED, THE
MACHINE REFERENCE MUST BE READJUSTED. FOR INFORMATION
ON HOW TO ADJUST THE MACHINE REFERENCE, REFER TO "3-4
CHANGING THE ORIGIN POSITION AND ADJUSTING THE MACHINE
REFERENCE" IN CHAPTER 4. WHEN THE TEMPERATURE OF THE
ROBOT JOINT SECTIONS IS HIGH IMMEDIATELY AFTER THE ROBOT
HAS BEEN OPERATED, THE MACHINE REFERENCE VALUE MIGHT BE
OUTSIDE THE SPECIFIED RANGE (40 TO 60%). WHEN CHECKING OR
ADJUSTING THE MACHINE REFERENCE VALUE, ALWAYS MAKE SURE
THAT THE TEMPERATURE OF THE ROBOT JOINT SECTIONS HAS
RETURNED TO ROOM TEMPERATURE.
RECOMMENDED MACHINE REFERENCE VALUE: 40 TO 60%
 Loading...
Loading...







