3-57
CHAPTER 3 Installation
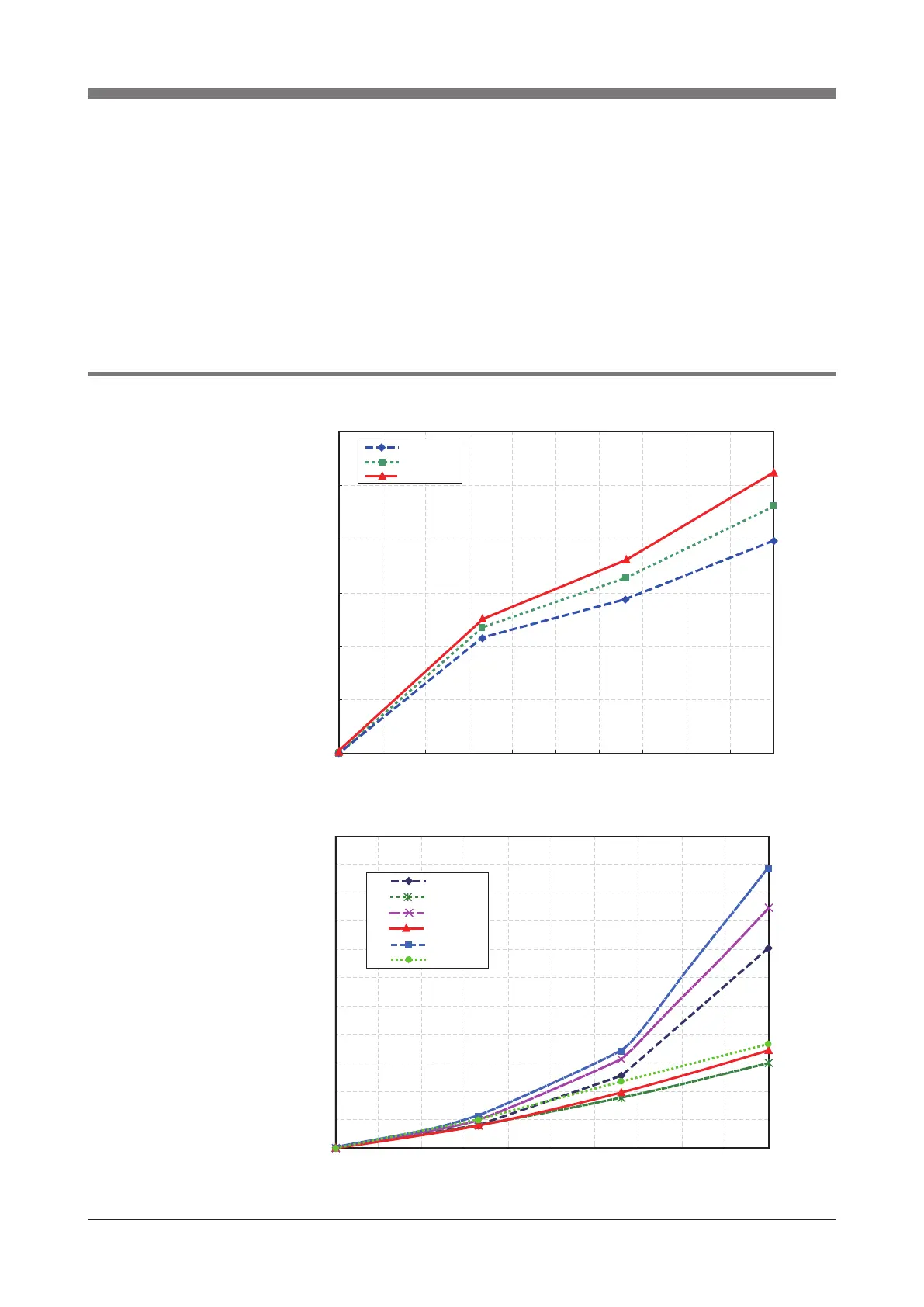
10 Stopping Time and Stopping Distance at
Emergency Stop
When the emergency stop button is pressed during robot operation or the power
supply to the controller is turned off, the stopping time and stopping distance or
angle of the main 3 axes change depending on the operation speed as shown be-
low. The following gures show typical time and distance or angle needed for
each axis to come to a stop after a stop signal is initiated when the robot arms
are fully extended while 3 types of tip mass (33%, 66% and 100% of maximum
payload) are loaded.
10-1 R6YXH250, R6YXH350, R6YXH400
XY-axis stopping time (sec.)
0
0.05
0.1
0.15
0.2
0.25
0.3
0 10 20 30 40 50 60 70 80 90 100
Operation speed (%)
1kg XY-axis
2kg XY-axis
3kg XY-axis
Fig. 3-51 XY-axis plus direction stopping time for R6YXH250
0 10 20 30 40 50 60 70 80 90 100
Operation speed (%)
XY-axis stopping rotation angle (°)
0
10
20
30
40
50
60
70
80
90
100
110
1kg X-axis
1kg Y-axis
2kg X-axis
3kg X-axis
3kg Y-axis
2kg Y-axis
Fig. 3-52
XY-arm plus direction stopping rotation angle for R6YXH250
 Loading...
Loading...







