4-8
CHAPTER 4 Adjustment
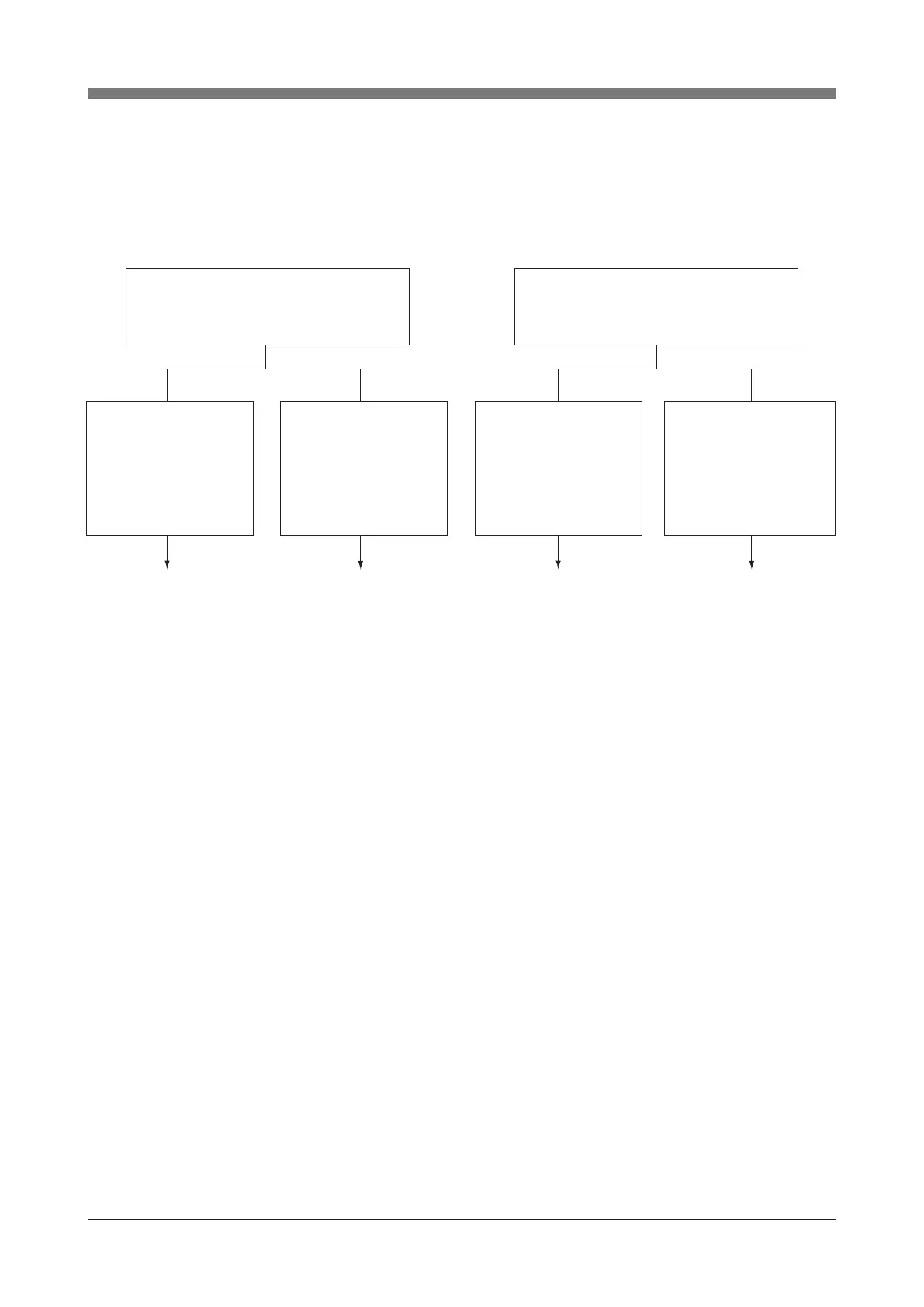
3-3-2 Mark method (X-axis, Y-axis, and R-axis)
The absolute reset in the mark method is divided into four types according to
the conditions as shown in Fig. 4-3.
Since each operating procedure is different, refer to the corresponding section
in this manual.
To perform absolute reset using the
same positions as the previous
absolute reset.
To perform absolute reset at a position
different from the previous absolute
reset position.
The origin position
mark can be seen
from outside the robot
movement range.
The origin position
mark cannot be seen
from outside the robot
movement range.
The servo drive can
safely guide the robot
arm to the new origin
position from outside
the robot movement
range.
The servo drive
cannot safely guide
the robot arm to the
new origin position
from outside the robot
movement range.
Go to "3-3-2-1
Absolute reset
with servo on
(re-reset)"
Go to "3-3-2-2
Absolute reset
with servo off
(re-reset)".
Go to "3-3-2-3
Absolute reset
with servo on
(new reset)".
Go to "3-3-2-4
Absolute reset
with servo off
(new reset)".
Fig. 4-3 Absolute reset ow chart
 Loading...
Loading...







