2-5
CHAPTER 2 Functions
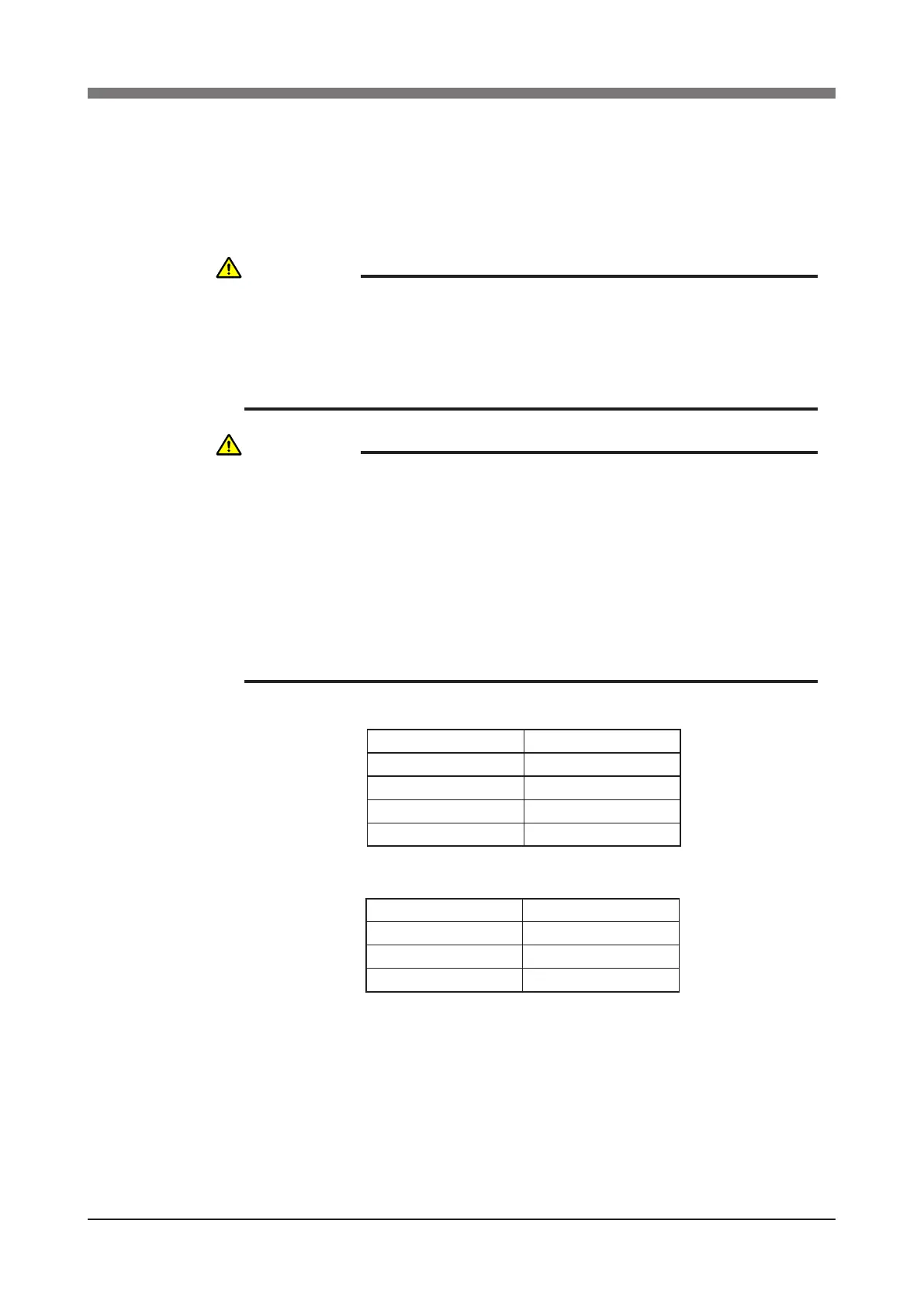
3 Robot initialization number list
The X series robots are initialized for optimum setting (default setting) accord-
ing to the robot model prior to shipping. The robot controllers do not have to be
reinitialized during normal operation. However, if for some reason the control-
ler must be reinitialized, proceed while referring to the list below.
Robot initialization number
2000
2001
2002
2008
Model name
R6YXH250 Z150
R6YXH350 Z150
R6YXH400 Z150
R6YXX1200 Z400
Robot initialization number list (Origin mark model)
Robot initialization number
2100
2101
2102
Model name
R6YXH250 Z150
R6YXH350 Z150
R6YXH400 Z150
Robot initialization number list (Origin sensor model)
CAUTION
ABSOLUTE RESET MUST BE PERFORMED AFTER REINITIALIZING THE
CONTROLLER.
BEFORE REINITIALIZING THE CONTROLLER, READ THE
DESCRIPTIONS IN "3. ADJUSTING THE ORIGIN" IN CHAPTER 4 AND
MAKE SURE YOU THOROUGHLY UNDERSTAND THE PROCEDURE.
CAUTION
WHEN THE CONTROLLER IS INITIALIZED, THE "ARM LENGTH" AND
"OFFSET PULSE" SETTINGS IN THE AXIS PARAMETERS WILL BE
ERASED, MAKING THE STANDARD COORDINATE SETTINGS INVALID.
(FOR DETAILS ON STANDARD COORDINATES, SEE "5. SETTING THE
STANDARD COORDINATES" IN CHAPTER 4.)
IF YOU DO NOT WANT TO CHANGE THE ORIGIN POSITION BY
INITIALIZING, MAKE A NOTE OF THE "ARM LENGTH" AND "OFFSET
PULSE" SETTINGS BEFORE INITIALIZING, AND RE-ENTER THEIR
SETTINGS AFTER INITIALIZATION IS COMPLETE.
 Loading...
Loading...







