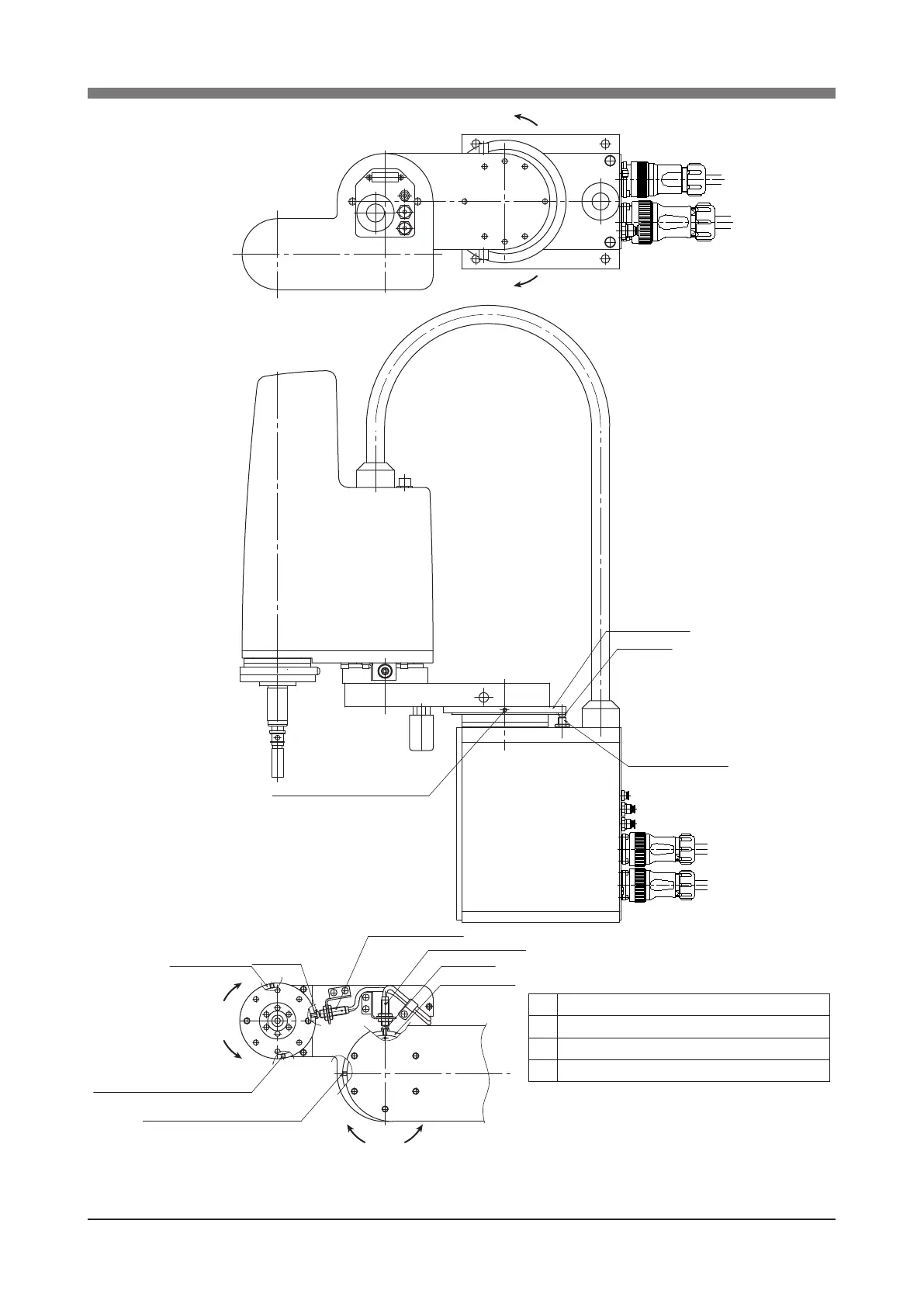
X-axis dog ring
X-axis dog
X-axis origin sensor
Y-axis origin sensor
Y-axis dog ring
Y-axis dog
Set screw (One each on opposite sides)
Set screw (One each on opposite sides)
R-axis dog ring
R-axis dog
R-axis origin sensor
Set screw (One each on opposite sides)
Axis
X
Y
R
Movement amount (mm) for 100% of machine reference
1.88
1.54
1.38
* Machine reference < 40% : Movement in direction 1
Machine reference > 60% : Movement in direction 2
2
1
1 2
1
2
Table 4-2
Fig. 4-7
 Loading...
Loading...







