13.5 Command: Move
Program commands need to be inserted here. Press the Structure button to go to
the structure tab, where the various selectable program lines can be found. A program
cannot run before all lines are specified and defined.
13.5 Command: Move
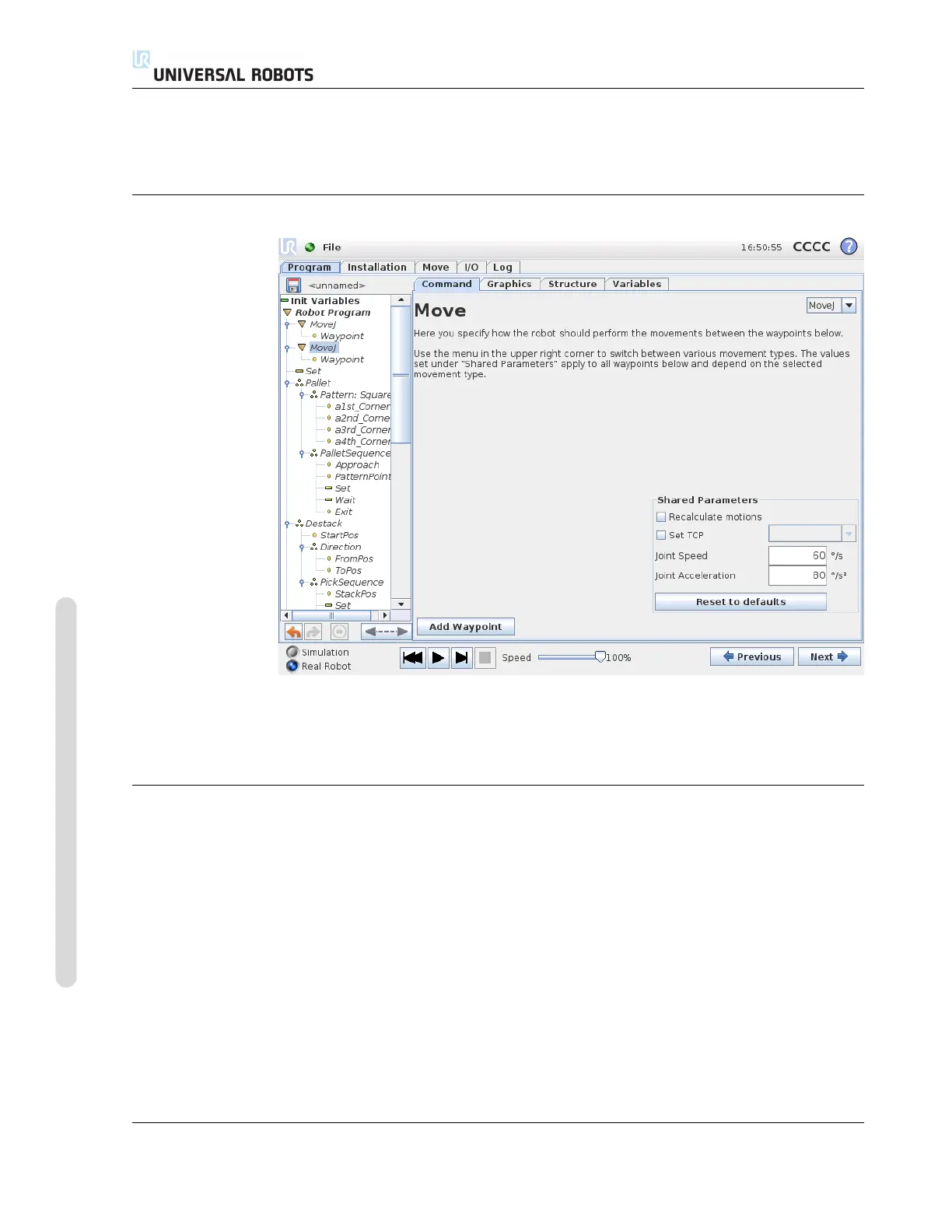
The Move command controls the robot motion through the underlying waypoints.
Waypoints have to be under a Move command. The Move command defines the ac-
celeration and the speed at which the robot arm will move between those waypoints.
Movement Types
It is possible to select one of three types of movements: MoveJ, MoveL and MoveP each
explained below.
• moveJ will make movements that are calculated in the joint space of the robot arm.
Each joint is controlled to reach the desired end location at the same time. This
movement type results in a curved path for the tool. The shared parameters that
apply to this movement type are the maximum joint speed and joint acceleration
to use for the movement calculations, specified in deg/s and deg/s
2
, respectively.
If it is desired to have the robot arm move fast between waypoints, disregarding
the path of the tool between those waypoints, this movement type is the favorable
choice.
• moveL will make the tool move linearly between waypoints. This means that
each joint performs a more complicated motion to keep the tool on a straight line
CB3 II-50 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.