4.4 Tool I/O
Parameter Min Typ Max Unit
Voltage when open -0.5 - 26 V
Voltage when sinking 1A - 0.05 0.20 V
Current when sinking 0 - 1 A
Current through GND 0 - 1 A
An example of how to use a digital output is shown in the following subsection.
CAUTION:
1. The digital outputs in the tool are not current limited and over-
riding the specified data can cause permanent damage.
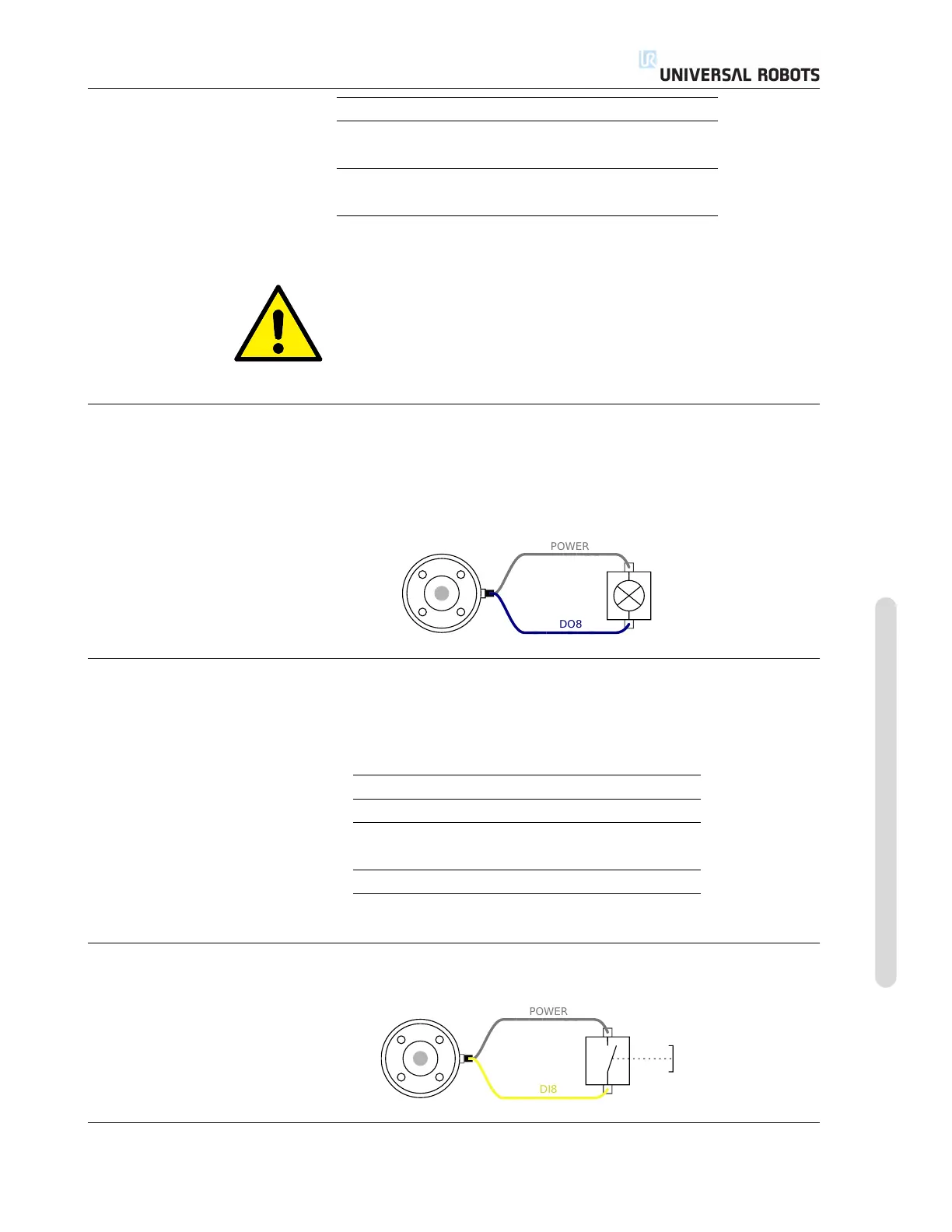
4.4.1.1 Using the Tool Digital Outputs
The example below illustrates how to turn on a load, when using the internal 12V
or 24V power supply. Remember that you have to define the output voltage at the
I/O tab. Keep in mind that there is voltage between the POWER connection and the
shield/ground, even when the load is turned off.
4.4.2 Tool Digital Inputs
The digital inputs are implemented as PNP with weak pull-down resistors. This
means that a floating input will always read low. The electrical specifications are
shown below.
Parameter Min Typ Max Unit
Input voltage -0.5 - 26 V
Logical low voltage - - 2.0 V
Logical high voltage 5.5 - - V
Input resistance - 47k - Ω
An example of how to use a digital input is shown in the following subsection.
4.4.2.1 Using the Tool Digital Inputs
The example below shows how to connect a simple button.
Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.
I-33 UR5/CB3

 Loading...
Loading...









