1.9 Movement Without Drive Power
1.9 Movement Without Drive Power
In the unlikely event of an emergency situation where one or more robot joints need to
be moved and robot power is either not possible or unwanted, there are two different
ways to force movements of the robot joints:
1. Forced back-driving: Force a joint to move by pushing or pulling the robot arm
hard (500 N). Each joint brake has a friction clutch which enables movement dur-
ing high forced torque.
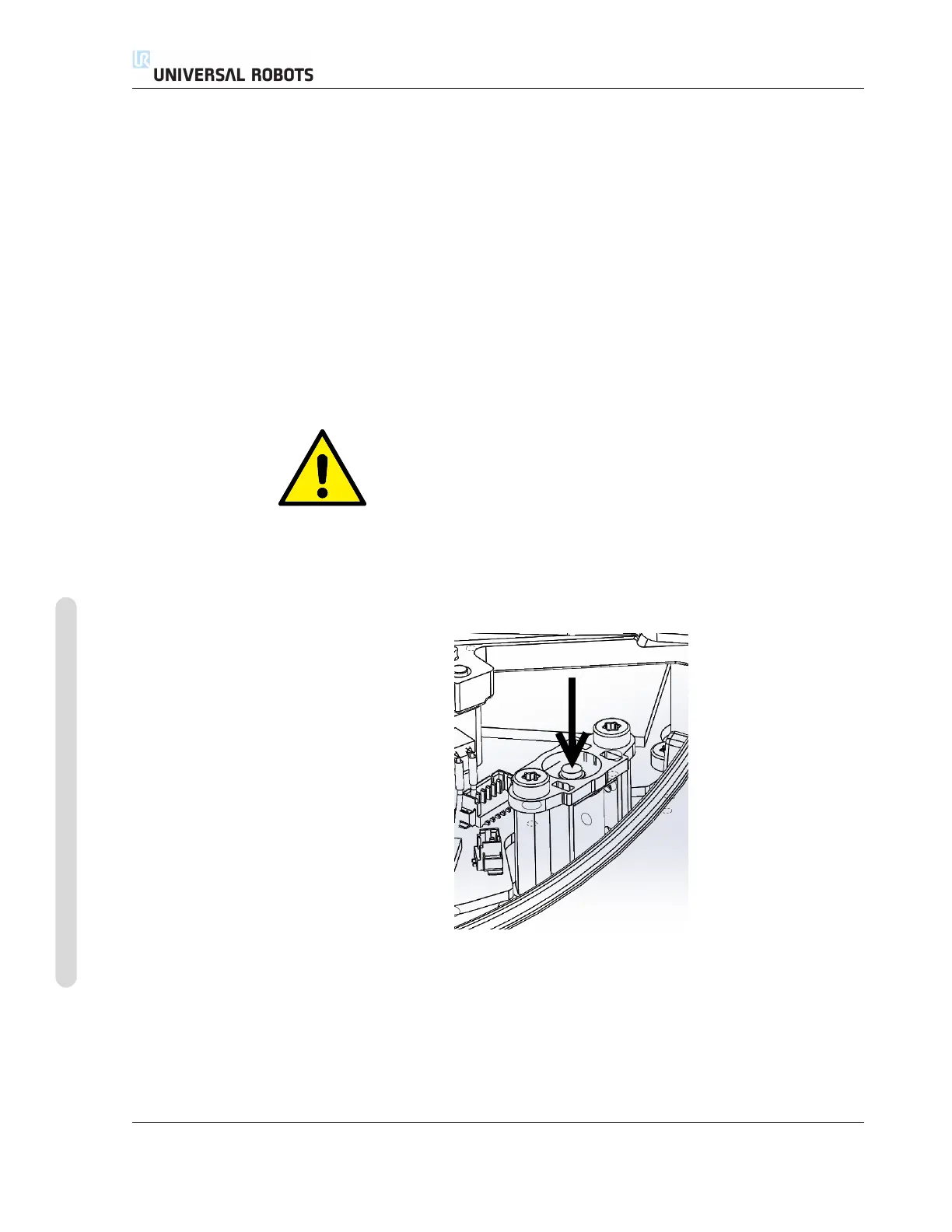
2. Manual brake release: Remove the joint cover by removing the few M3 screws
that fix it. Release the brake by pushing the plunger on the small electromagnet
as shown in the picture below.
WARNING:
1. Moving the robot arm manually is intended for urgent emer-
gencies only and might damage the joints.
2. If the brake is released manually, gravitational pull can cause
the robot arm to fall. Always support the robot arm, tool and
work item when releasing the brake.
UR5/CB3 I-10 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.

 Loading...
Loading...









