15.9 General Limits
15.8 Apply
When unlocking the safety configuration, the robot arm will be powered off while
changes are being made. The robot arm cannot be powered on until the changes have
been applied or reverted, and a manual power on is performed from the initialization
screen. Any changes to the safety configuration must be applied or reverted, before
navigating away from the Installation tab. These changes are not in effect until after the
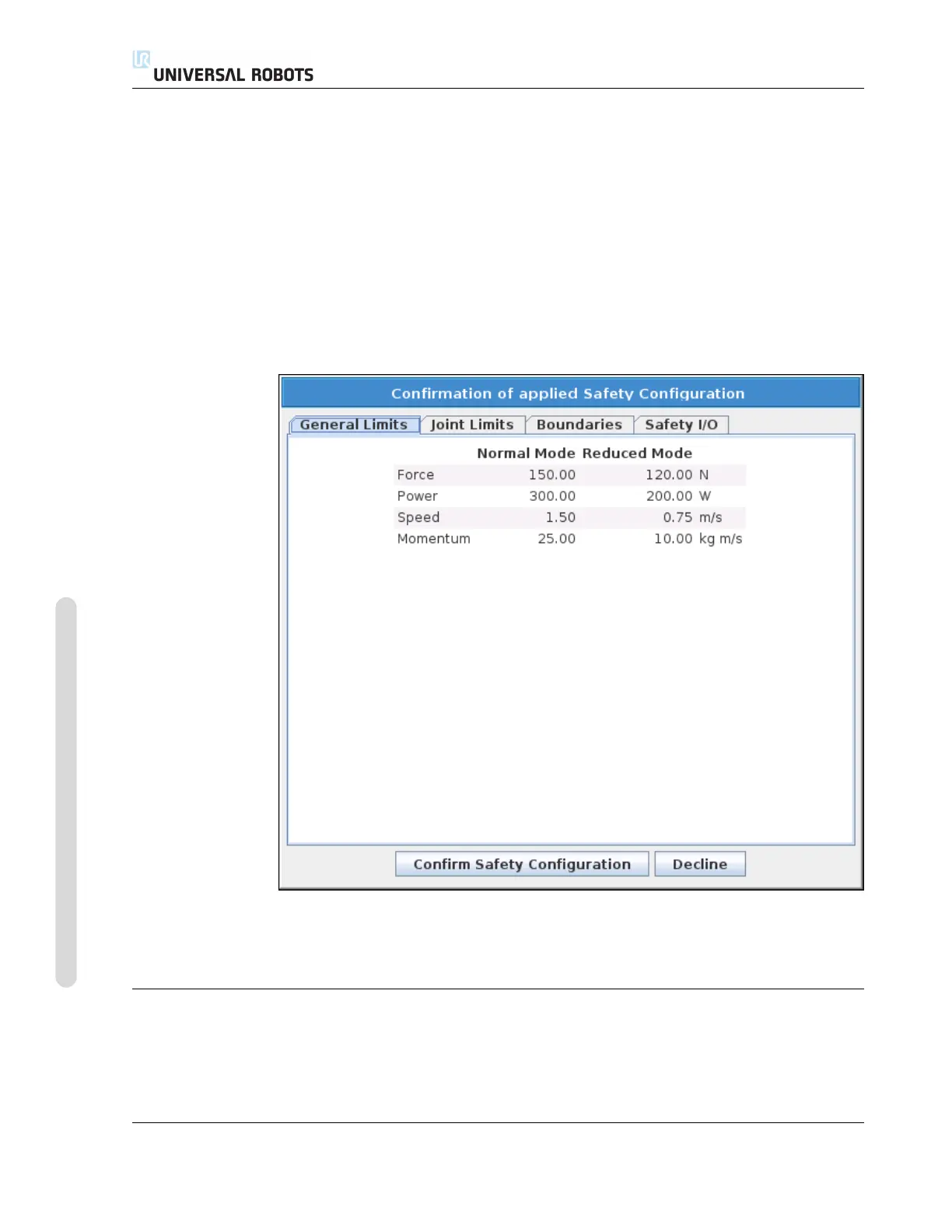
Apply button is pressed and confirmation is performed. Confirmation requires visual
inspection of the changes given to the robot arm. For safety reasons, the information
shown is given in SI Units. An example of the confirmation dialog is shown in figure
15.8.
Furthermore, on confirmation the changes are automatically saved as part of the cur-
rent robot installation. See 12.5 for further information on saving the robot installation.
15.9 General Limits
The general safety limits serve to limit the linear speed of the robot TCP as well as the
force it may exert on the environment. They are composed of the following values:
Force: A limit for the maximum force that the robot TCP exerts on the environment.
CB3 II-98 Version 3.1 (rev. 17782)
Copyright © 2009-2015 by Universal Robots A/S. All rights reserved.

 Loading...
Loading...









