the manual to confirm that there is no obvious damage to the equipment.
When there is no obvious damage, connect the servo driver and servo motor, and connect the
power supply. Note that the power supply cannot be wrongly connected. The U, V and W
connectors of the power cable must be connected with the U, V and W terminals on the servo
driver one by one, and cannot be crossed, otherwise the servo motor will be locked or fly.
Turn on the power and BB will be displayed on the servo panel;
After power on again, enter parameter F1-02 for self adjustment of primary current offset. See
auxiliary operation for specific operation methods;
Enter parameter F1-01, long press ENTER, short press ENTER, and then press INC/ DEC to
check the operation status of the motor. If the motor can run smoothly, the wiring is normal, and if
the motor does not rotate, it is abnormal;
If the wiring is normal, enter the parameter F1-00 for inching operation. After ensuring that there
is no error, install the motor to the mechanical equipment;
Before officially starting the equipment, set the parameters of the servo driver according to the
actual application and adjust them according to the actual application.
Appendix 3.Servo general mode parameters
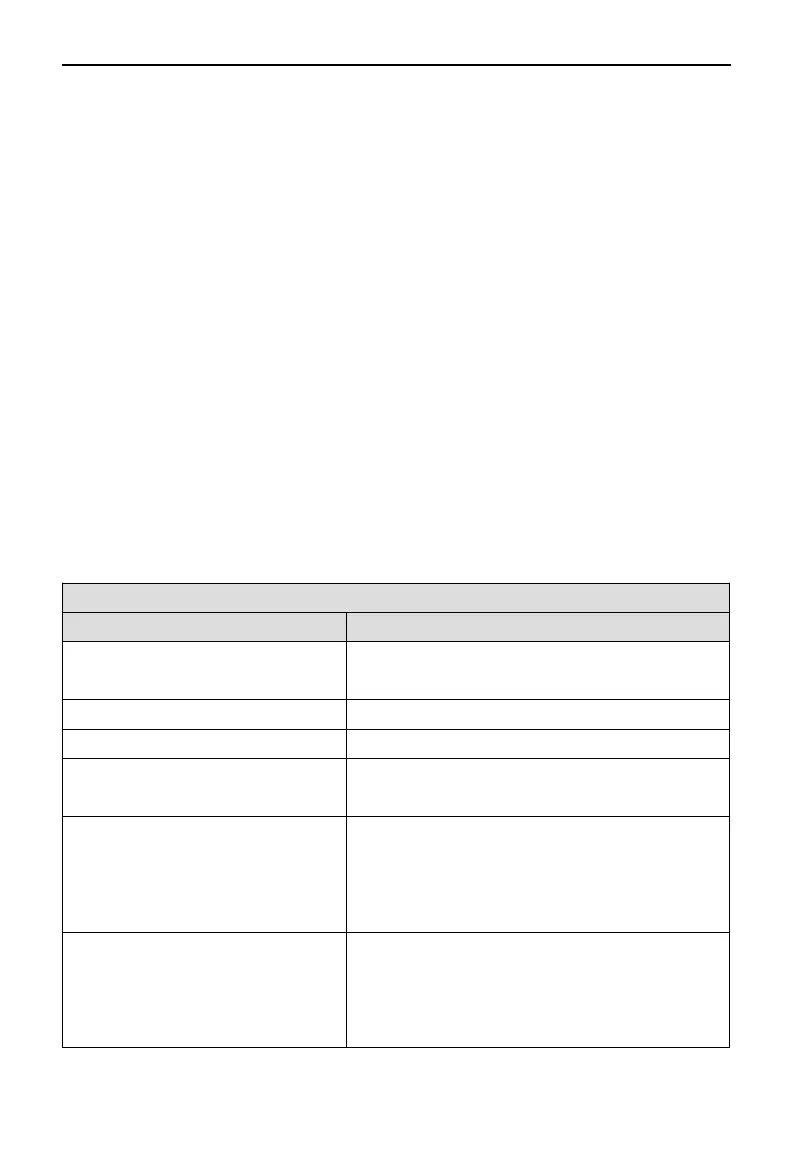
Basic parameters
Parameter Essentials
P0-03 enable mode
P5-20 servo ON signal /S-ON
Enable mode selection: generally, P0-03 defaults, and P5-
20 sets n.0010 to enable as soon as it is powered on
P0-04 rigidity grade Adjust servo gain in self-tuning fast adjustment mode
P0-05 definition of rotation direction Determine the motor direction, generally 0/1 by default
P0-25 discharge resistance power value
P0-26 discharge resistance value
Set the specification parameters of external regeneration
resistance to ensure that they are the same as the actual ones
P3-28 internal forward torque limit
P3-29 internal reverse torque limit
P3-30 external forward torque limit
P3-31 external reverse torque limit
Set the servo torque limit source and limit value. The
default value is in percent of the servo torque
P5-44 power loss brake / BK
P5-07 servo off delay time
P5-08 brake command output speed
P5-09 brake command waiting time
The motor with brake adopts servo SO terminal to control
the setting parameters of brake
119
 Loading...
Loading...


