manually. Manual modification may lead to the risk of system runaway.
5-3.DS5 series manual adjustment mode
Manual adjustment mode is to manually set the relevant parameters of self-tuning in the self-tuning mode, so
as to solve the problems in some specific occasions, such as the failure of upper computer self-tuning, the
failure of self-tuning and the failure of self-tuning.
5-3-1.Adjustment steps example
In position mode, if soft mode (P2-02.0 = 1) is selected for self-tuning, the function of model ring is closed;
Set loop gain is invalid in speed mode.
When improving response
1. Reduce torque command filtering time constant (P2-35)
2. Increase speed loop gain (P1-00)
3. Decrease speed loop integration time parameter (P1-01)
4. Increase position loop gain (P1-02)
5. Increase model loop gain (P2-49)
Reduce response to prevent vibration and overshoot
1. Reduce speed loop gain (P1-00)
2. Increase the integral time constant of velocity loop (P1-01)
3. Reduce position loop gain (P1-02)
4. Increase the torque command filtering time constant (P2-35)
5. Reduce model loop gain (P2-49)
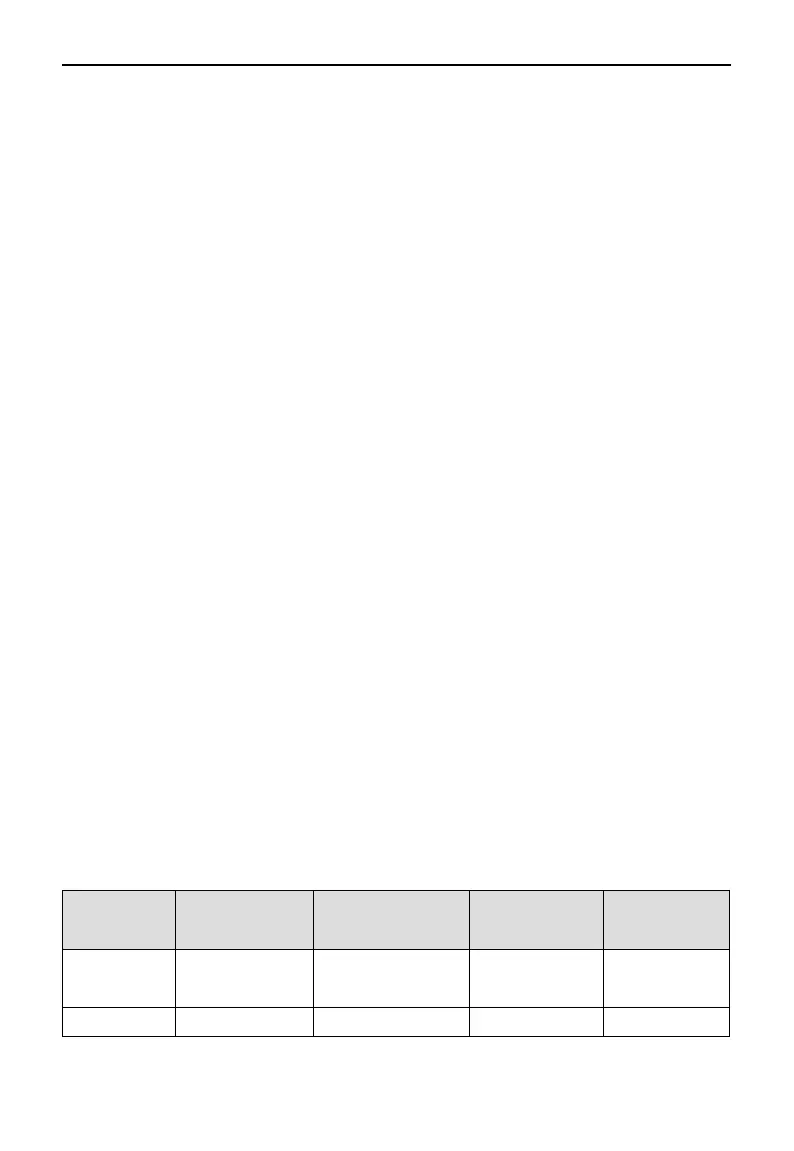
5-3-2. Reference values of inertia gain parameters of different loads in manual adjustment
mode
Inertia of the
load
P1-00 P1-01 P1-02 P2-49
Less than 10
times
400~500 1000~1500 400~500
About 1000
10~30 times 300~400 1500~2000 400~500
About 800
59
 Loading...
Loading...


