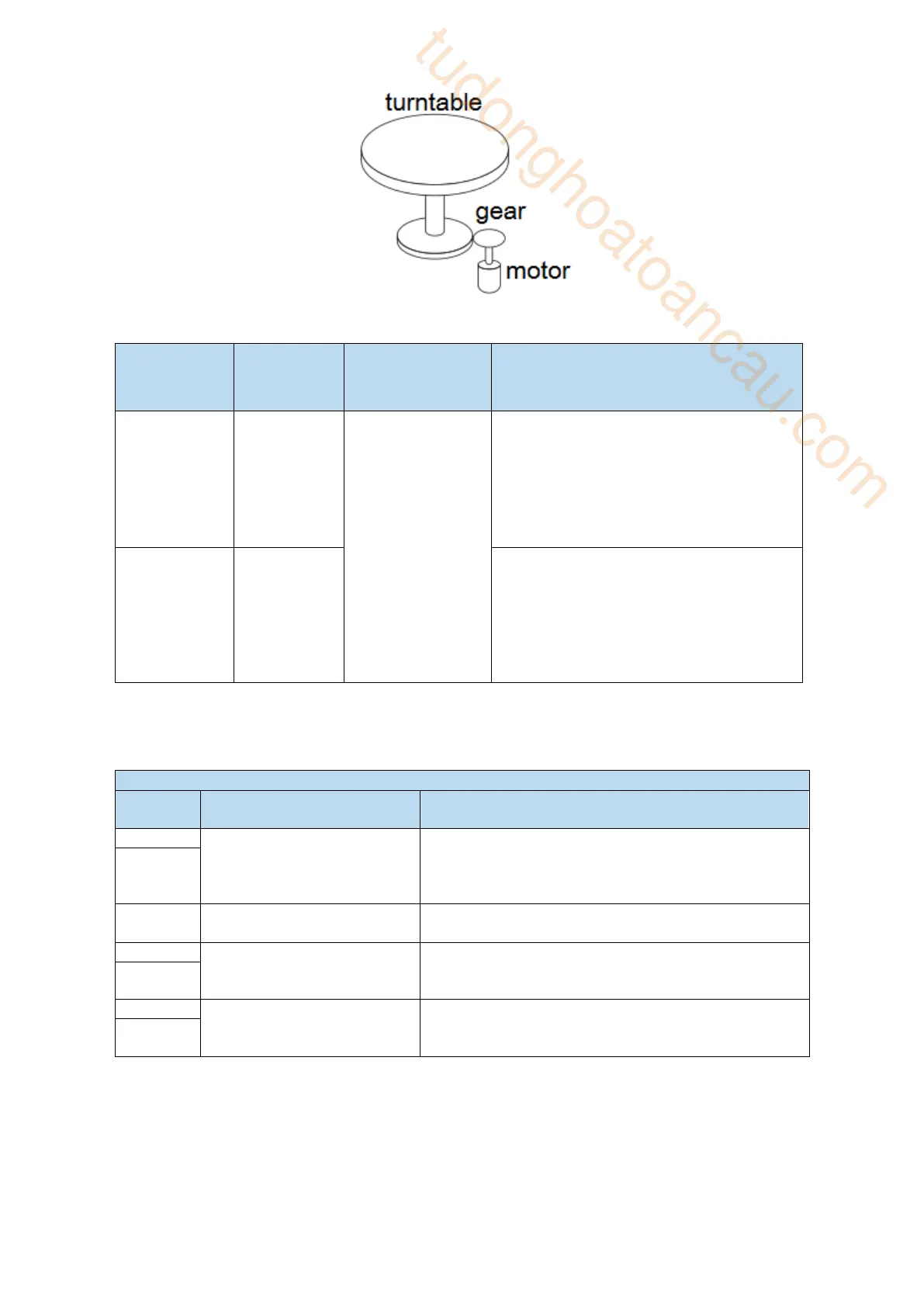
Because it can only rotate in one direction, after a certain period of time, the number of revolving
cycles will always exceed the upper limit of absolute value encoder.
Resolution
(single-circle
data)
Rotating Circle
Serial Data
Output range
When it is higher than the upper limit value
in the forward direction (+32767*2^ 17):
Rotation serial data = 32767*2^17
When it is below the lower limit of reversal
direction (-32768*2^ 17):
Rotation Serial Data=-32767*2^17
When it is higher than the upper limit value
in the forward direction (+32767*2^23):
Rotation serial data = 32767*2^23
When it is below the lower limit of reversal
direction (-32768*2^ 23):
Rotation Serial Data=-32767*2^23
5.6.4 Read absolute position through communication
Absolute value single-turn position, read 0x100A and
0x100B hexadecimal address through Modbus RTU,
U0-10+ U0-11*10000 is present encoder single-turn
position
present turns of multi-turn
absolute
Read 0x105B hex address through ModbusRTU, which
is the current number of encoder turns;
absolute encoder present
position feedback low 32-bit
Read 0x1039 hex address through ModbusRTU
doubleword, which is the current encoder position, with
positive and negative pulses;
absolute encoder present
position feedback high 32-bit
Read 0x103B hexadecimal address through
ModbusRTU doubleword, which is the high bit of
current encoder and needs to add the low bit data;
Servo driver transmits position data information of encoder through RS485 port and Modbus RTU
protocol.
◼ 17-bit absolute value encoder has 131072 pulses per cycle.
First read the U0-60 (0x103C) value
(1) 0 means running in the positive direction. The current position of the encoder is
U0-57*1+U0-58*2^16.
tudonghoatoancau.com
 Loading...
Loading...
