64 Program features
Jogging
Two jogging functions (1 or 2) are available. When a jogging function is activated, the
drive starts and accelerates to the defined jogging speed along the defined jogging
acceleration ramp. When the function is deactivated, the drive decelerates to a stop
along the defined jogging deceleration ramp. One push button can be used to start
and stop the drive during jogging. The jogging function is typically used during
servicing or commissioning to control the machinery locally.
Jogging functions 1 and 2 are activated by a parameter or through fieldbus. For
activation through fieldbus, see parameter 02.22 FBA main cw or 02.36
EFB main cw.
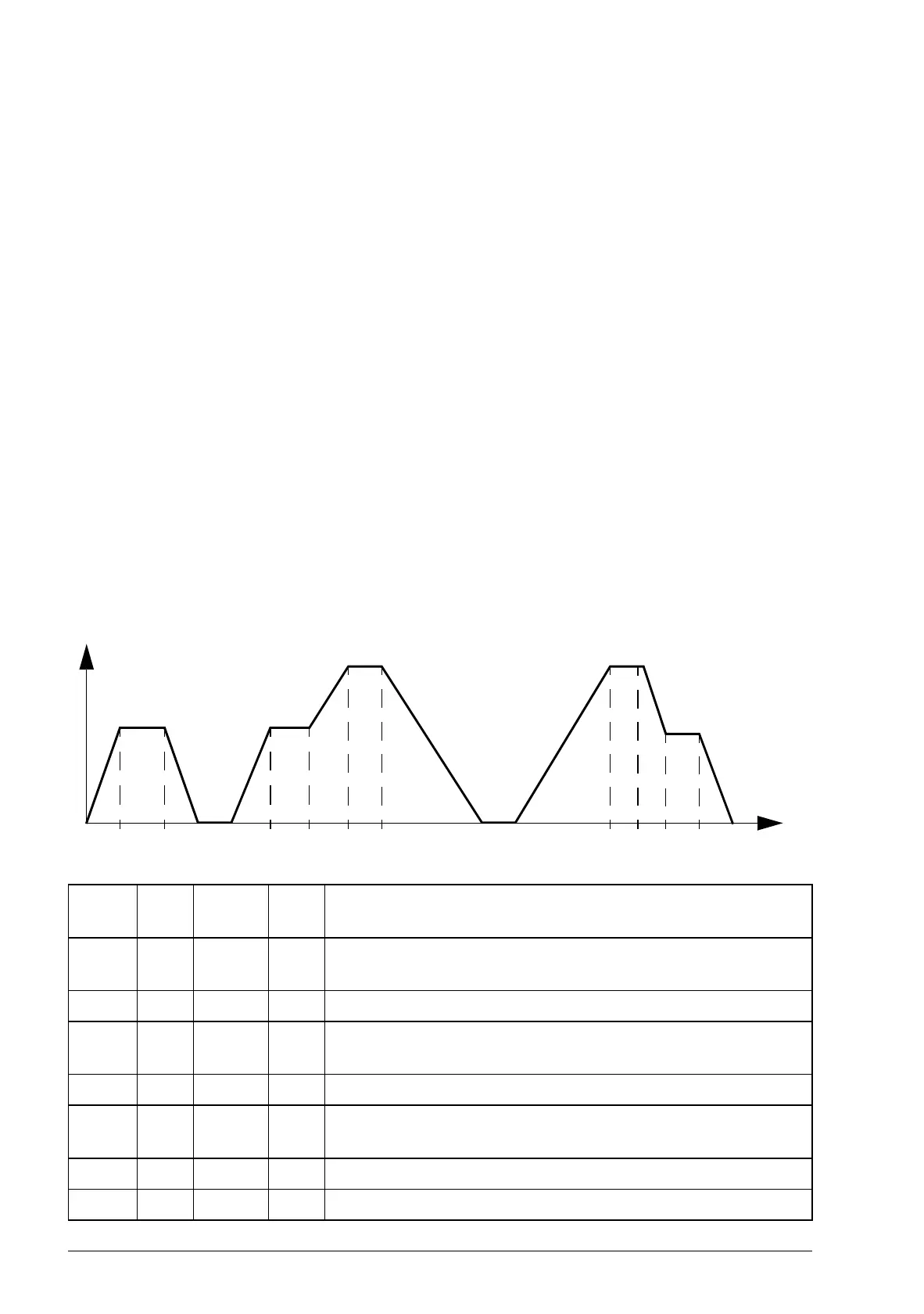
The figure and table below describe the operation of the drive during jogging. (Note
that they cannot be directly applied to jogging commands through fieldbus as those
require no enable signal; see parameter 10.09 Jog enable.) They also represent how
the drive shifts to normal operation (= jogging inactive) when the drive start command
is switched on. Jog cmd = State of the jogging input; Jog enable = Jogging enabled
by the source set by parameter 10.09 Jog enable; Start cmd = State of the drive start
command.
Phase
Jog
cmd
Jog
enable
Start
cmd
Description
1-2 1 1 0 Drive accelerates to the jogging speed along the acceleration
ramp of the jogging function.
2-3 1 1 0 Drive runs at the jogging speed.
3-4 0 1 0 Drive decelerates to zero speed along the deceleration ramp
of the jogging function.
4-5 0 1 0 Drive is stopped.
5-6 1 1 0 Drive accelerates to the jogging speed along the acceleration
ramp of the jogging function.
6-7 1 1 0 Drive runs at the jogging speed.
7-8 x 0 1 Jog enable is not active; normal operation continues.
Time
Speed
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Jogging example
 Loading...
Loading...
















