68 Program features
Sensors like absolute encoders and resolvers indicate the rotor position at all times
after the offset between the zero angle of rotor and that of the sensor has been
established. On the other hand, a standard pulse encoder determines the rotor
position when it rotates but the initial position is not known. However, a pulse encoder
can be used as an absolute encoder if it is equipped with Hall sensors, albeit with
coarse initial position accuracy. The Hall sensors generate so-called commutation
pulses that change their state six times during one revolution, so it is only known
within which 60° sector of a complete revolution the initial position is.
The autophasing routine is performed with permanent magnet synchronous motors
and synchronous reluctance motors in the following cases:
1. One-time measurement of the rotor and encoder position difference when an
absolute encoder, a resolver, or an encoder with commutation signals is used
2. At every power-up when an incremental encoder is used
3. With open-loop motor control, repetitive measurement of the rotor position at
every start.
Several autophasing modes are available (see parameter 11.07 Autophasing mode).
The turning mode is recommended especially with case 1 as it is the most robust and
accurate method. In turning mode, the motor shaft is turned back and forward (±360/
polepairs)° in order to determine the rotor position. In case 3 (open-loop control), the
shaft is turned only in one direction and the angle is smaller.
The standstill modes can be used if the motor cannot be turned (for example, when
the load is connected). As the characteristics of motors and loads differ, testing must
be done to find out the most suitable standstill mode.
A rotor position offset used in motor control can also be given by the user. See
parameter 97.20 PM angle offset.
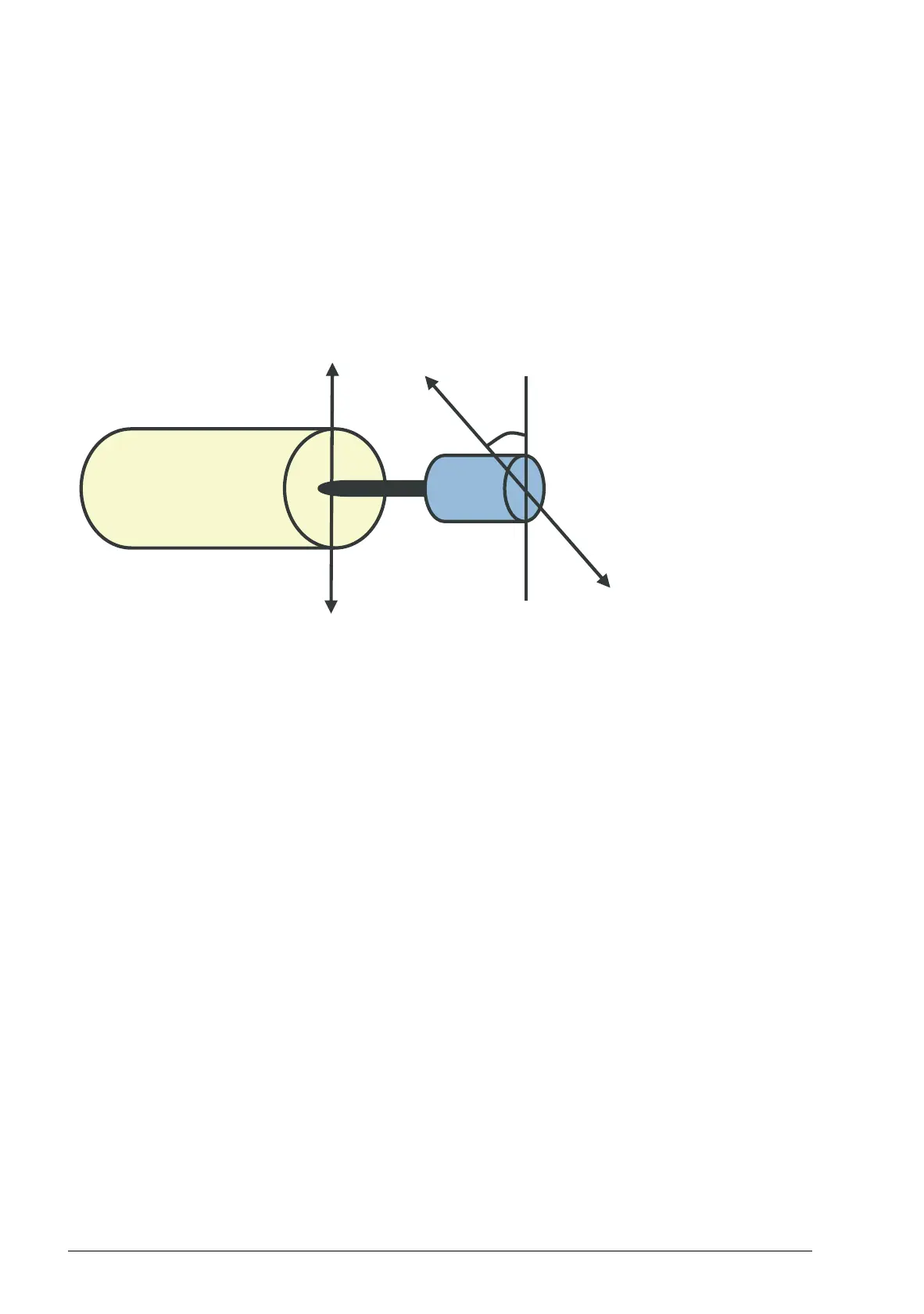
Absolute encoder/resolver
Rotor
N
S

 Loading...
Loading...















