Chapter 2 - Start-Up Instructions
IV F
2 - 22 DCS 600 Operating Instructions
2.7 Balancing the speed controller, plus fine-balancing the EMF
The balancing procedure indicated below assumes that the coupled load will with-
stand speed jumps. If this is not allowed for the load, a different setting of the listed
parameters will be required.
Reference values switching over between the internal potentiometers POT1 and POT2
(Parameters 17.01 and 17.02) will be used for balancing the controllers. Parameter
PERIOD 17.03 defines the period of switch-over; value 1 corresponds to 10 msec.
15.02 = 9
Switch-over of reference value for the speed controller, also suitable for the EMF
controller.
17.04 = SQWAVE
Selection of the reference value switching over between POT1 and POT2.
22.01 = 0,1 s
Ramp-up time of ramp-function generator
22.02 = 0,1 s
Ramp-down time of ramp-function generator
Adjusting the potentiometers for speed controller balancing:
During acceleration/ braking, the drive should reach the current limitation, if necessary
increase the value of POT1.
Scaling of 17.01 and 17.02
⇒ 20 000 corresponds to 100 % speed.
17.01 (POT1) = 10%...20% max. speed
17.02 (POT2) = 0
17.03 (PERIOD) = Adapt as necessary.
Switch ON power; start drive.
DANGER: System components now energized!
Drive should run at speed values corresponding to POT1 and “0”.
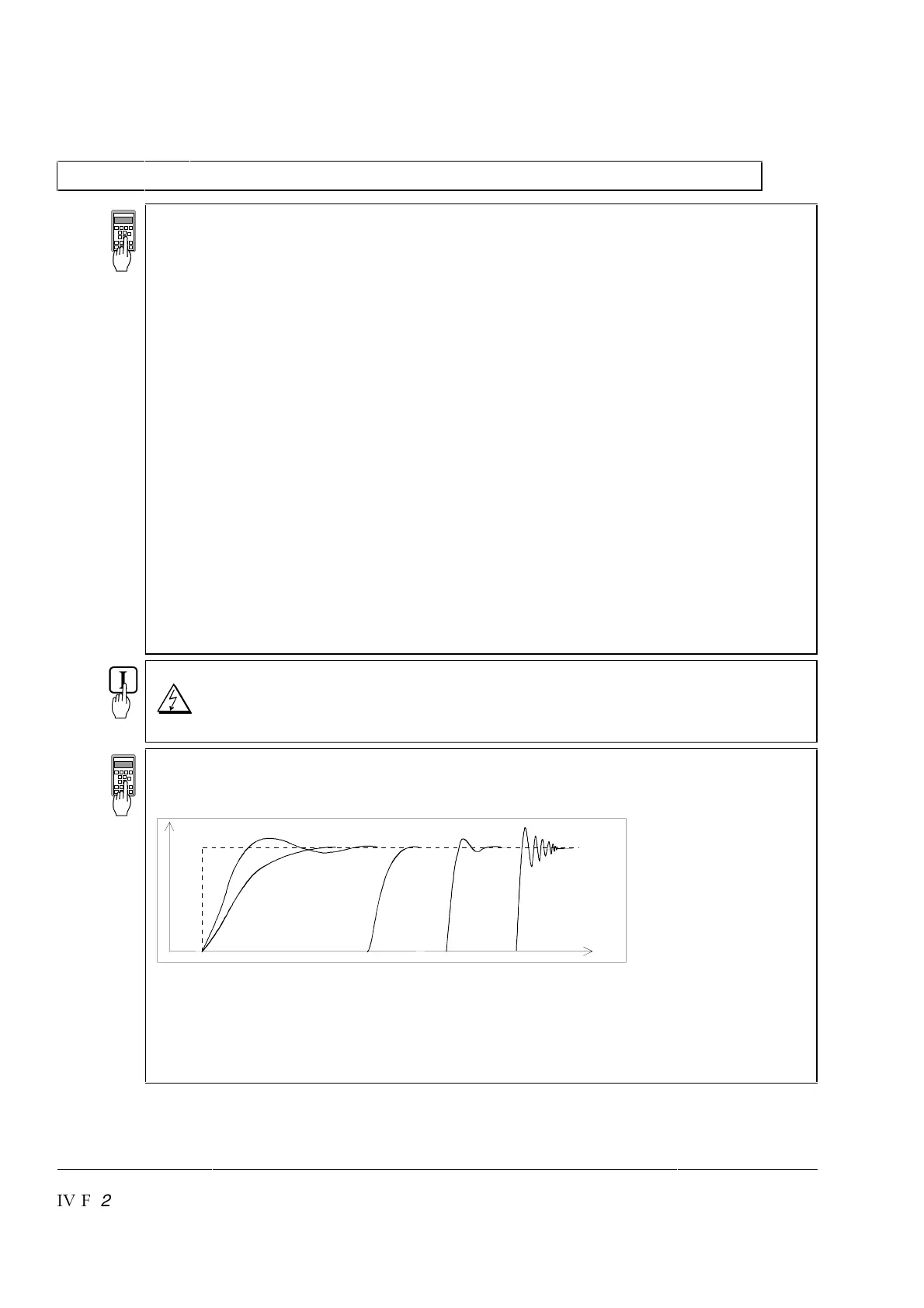
For assessing control quality, the figure below can be used.
Oscillograph speed feedback via D/A output, or if one is to hand, use program DRIVES
WINDOW to depict it via the Monitor menu and Parameter 1.04.
t
A
B
CD
E
F
Fig.: Transient response of controller
A: reference value jump
B: undercompensated; reset time and P-gain too small
C: undercompensated; P-gain too small
D: normal
E: slightly overcompensated; when a higher dynamic response is required
F: overcompensated; short reset time and a high P-gain

 Loading...
Loading...








