4 Repair
4.4.4. Replacement of upper arm
3HAC026876-001 Revision: F272
© Copyright 2007-2010 ABB. All rights reserved.
4.4.4. Replacement of upper arm
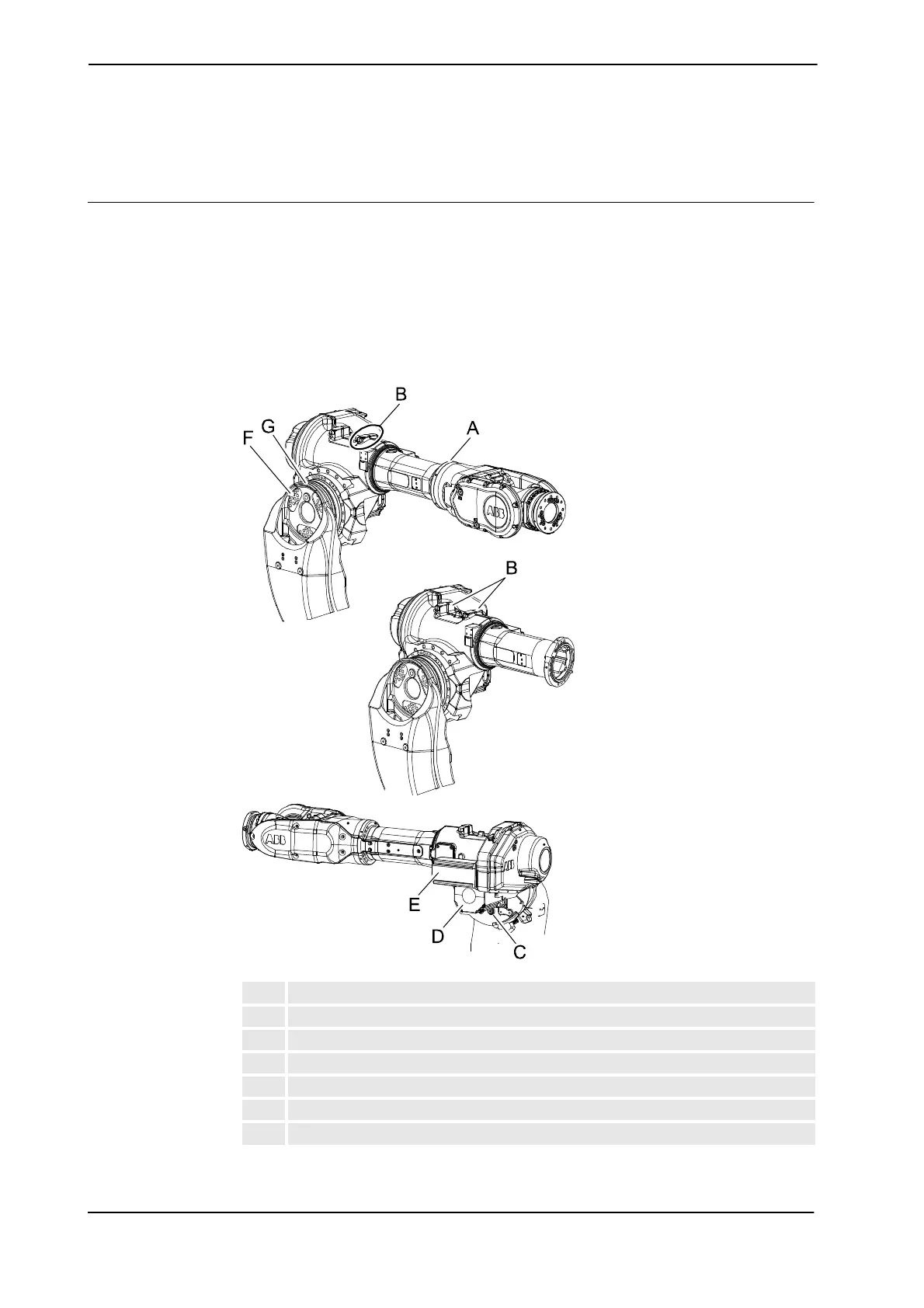
Location of upper arm
The upper arm is located on top of the robot as shown in the following figure. The complete
upper arm includes the wrist unit but this section also describes how to remove the upper arm
when there is no wrist unit mounted.
Note! The lifting device is attached differently depending on whether the wrist unit is
mounted on the upper arm or not. The attachment points are shown in the following figure.
A more detailed view of the component and its position may be found in chapter Exploded
views in the Product manual, reference information.
xx0700000345
A Attachment hole for lifting eye, M12 (if the wrist unit is mounted)
B Attachment for lifting device, upper arm, 2 pcs (if there is no wrist unit mounted)
C Oil plug, draining, gearbox axis 3
D Motor, axis 3
E Motor, axis 4
F Attachment screws and washers, upper arm
G Sealing, axes 2/3 (between lower arm and gearbox axis 3)
Continues on next page
 Loading...
Loading...






