Parameters and Data Structures on a Fieldbus
In the following chapter you find a detailed description of all UMC parameters, the format of the command monitoring and diagno-
sis telegrams. Furthermore the information is provided of how the UMC data is mapped to the different communication interface.
The tables below represents the data allocation as realised with the built-in standard applications. It may differ for
customer-specific applications!
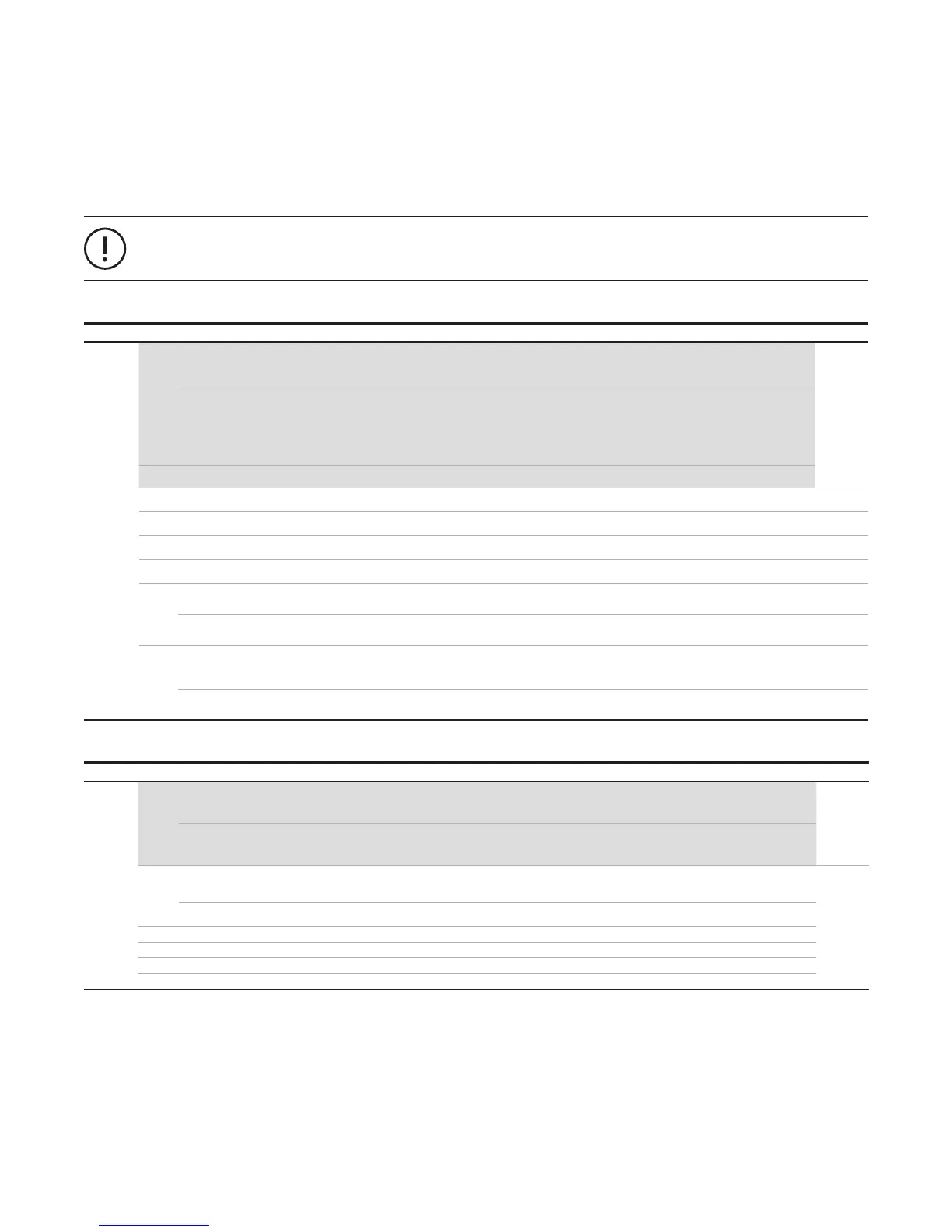
Monitoring Data
Word Byte
Summary
Warning
Summary
Fault
Local Control
Reverse
Lockout Time
Overload
warning
Run
Forward
/
Opening
Off
Run Reverse
/ Closing
Run
Fast
Forward
-
Motor Current in % of I
e
- - Run Time
Out of
Position
Torque Open
Torque
Closed
End Pos
Open
End Pos
Closed
U Imbal.
warn
U Imbal. trip Undervoltage
warn
Under-
voltage trip
Underpower
warn
Under-
power trip
Over-
power
warn
Over-
power trip
Earth fault
warning
Earth fault
trip
Cooling time
running
- No start
possible
left
start left
Command Data
Word Byte
- Fault
Reset
Auto
Mode
Prepare
Emergency
Start
- Run
Forward
/
Opening
Off
Run Reverse
/ Closing
- - Run
Fast
Forward
-
- - -
- - - - - - -
-
Analogue Word
Analogue Word
Analogue Word
Analogue Word
Not for Actuator 1 ... 4
Only for Actuator 1 ... 4
Not for Overload Relay and Transparent
Only for Pole-Changing Starter
If start limit function is used
120

 Loading...
Loading...










