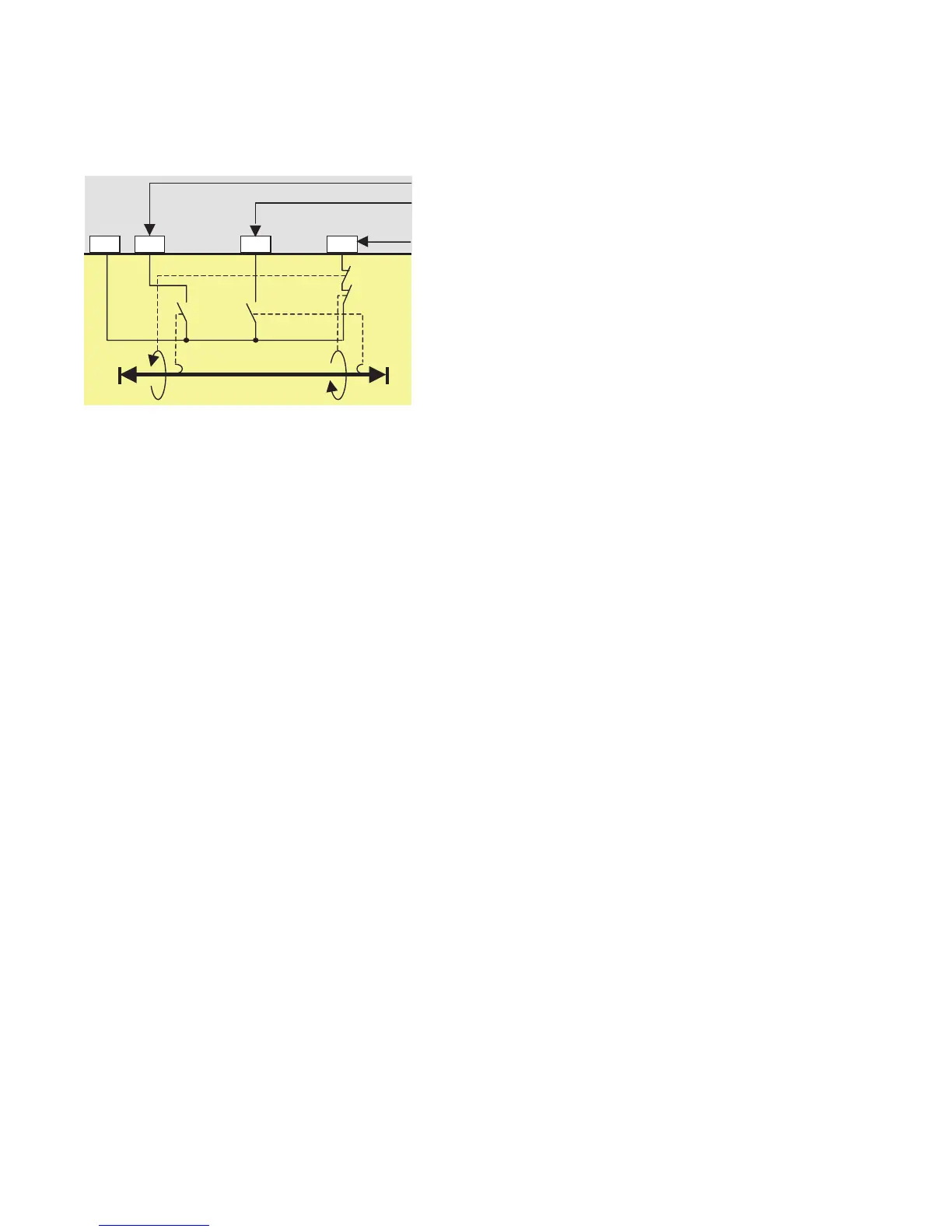
Limit switches
DI0: Preparation for Open limit motor off
DI1: Motor off, start only in Open direction
DI3: • Motor off if prepared for Open off, start only in
Closed direction
• Fault if not prepared or if during closing
Remark
• The limit switch Closed prepares the stop. Torque closed
stops the motor. Starting is only possible in the opposite di-
rection
• The single torque signals in the telegram - torque Open or
torque Closed - are calculated based on the direction of move-
ment before the stop.
Definitions and monitoring signals particular to the control functions Actuator 1,2,3 and 4
• Input signals: Open and Closed inputs are active signals, torque input is a closed loop signal.
• The two torque signals are connected in series. The discrete torque signal is created based on the previous direction of move-
ment.
Remark
If DI2 is not needed as fault input it can be connected to the link between the torque contacts to find out which torque signal is
active.
• Run-time Open <-> Closed: The Run-time limit (= Star-delta starting time) must be changed and should be set according to actua-
tor data. Setting the Run-time limit = 1 s disables the supervision.
• Starting from Open or Closed: The limit switch has to open within the start monitoring time of 3 s. Exceeding the time results in
the fault signal Open limit switch 1 -> 0 not occurring within 3 s after the Closed command. The start monitoring time can be ex-
tended.
• A faulty torque signal in the intermediate position sets the internal fault signal. The motor is stopped and can be started again
- after fault reset via fieldbus or other - AND -
- only in the opposite direction (previous direction is blocked).
After starting the torque signal must disappear within 0.5 s. Otherwise the internal fault signal is set again. A fault reset and
start in the opposite direction can be repeated as often as desired.
• If after powering up a torque signal (0-signal) is present and neither an Open nor a Closed signal is present it is presumed that
the torque occurred during closing. The motor can be started:
- after fault reset via fieldbus or other - AND -
- only in the Open direction
89

 Loading...
Loading...










