202 Rockwell Automation Publication 520-UM001A-EN-E - February 2013
Appendix F PID Set Up
• A459 [PID 1 Ref Sel] = 5 “0-10V Input”
Invert Function
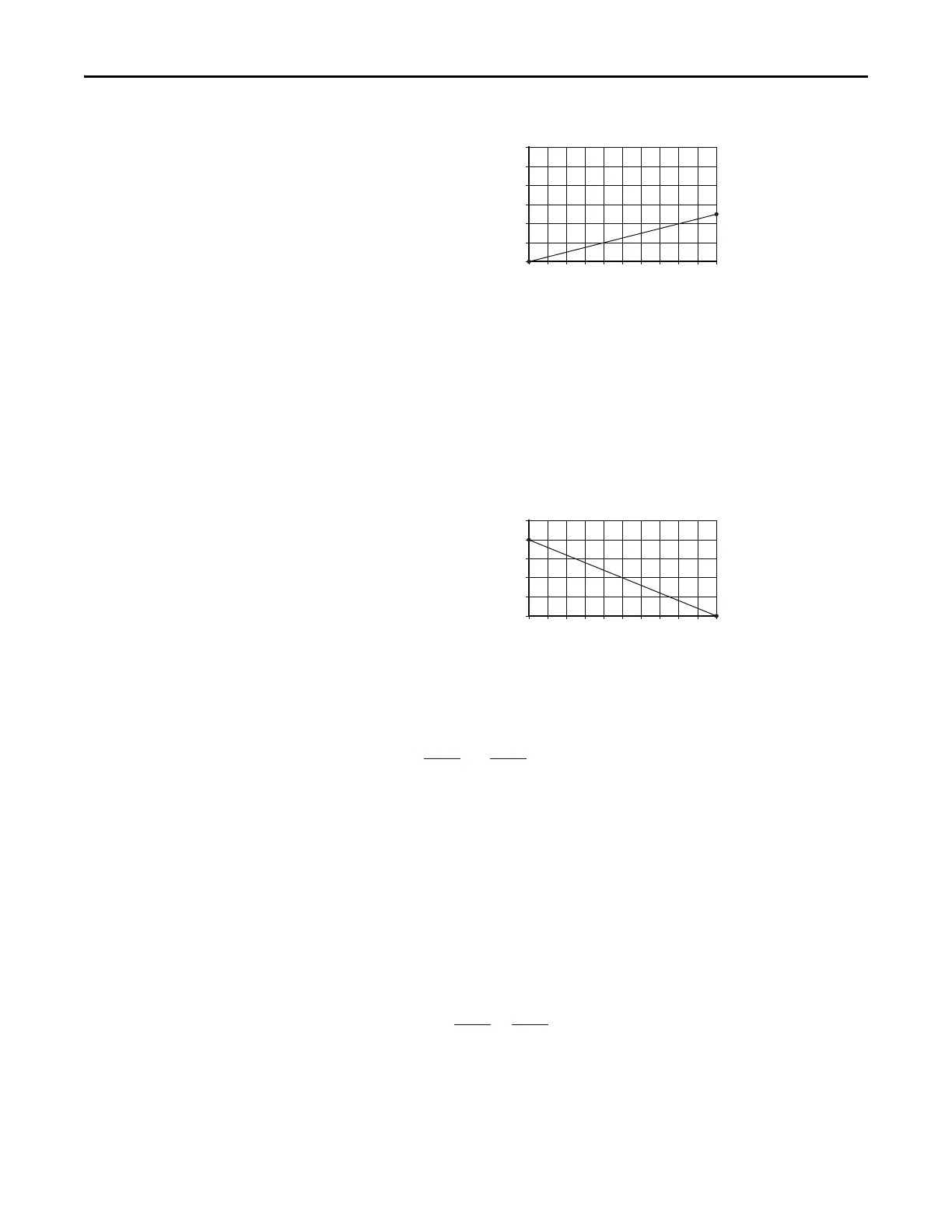
For a 4-20 mA signal, the following parameter settings are used so that a 20 mA
signal = 0% PID Reference and a 4 mA signal = 100% PID Reference.
• t092 [Anlg In4-20mA Lo] = 100.0%
• t096 [Anlg In4-20mA Hi] = 0.0%
• A459 [PID 1 Ref Sel] = 6 “4-20mA Input”
PID Deadband
Parameters A465 and A477 [PID x Deadband] are used to set a range, in percent,
of the PID Reference that the drive will ignore.
Example
• A465 [PID 1 Deadband] = 5.0%
• The PID Reference is 25.0%
• The PID Regulator will not act on a PID Error that falls between 20.0 and
30.0%
PID Preload
The value set in A466 or A478 [PID x Preload], in Hz, will be pre-loaded into
the integral component of the PID at any start or enable. This will cause the
0 10 20 30 40 50 60 70 80 90 100
PID Reference (%)
Input Volts
2
4
6
8
10
12
0102030405060708090100
PID Reference (%)
4-20 mA Input
4
8
12
16
20
24

 Loading...
Loading...













