Rockwell Automation Publication 520-UM001A-EN-E - February 2013 201
PID Set Up Appendix F
PID Reference and Feedback
PID mode is enabled by setting P047, P049 or P051 [Speed Referencex] to
11 “PID1 Output” or 12 “PID2 Output”, and activating the corresponding speed
reference.
If A459
or A471 [PID x Ref Sel] is not set to 0 “PID Setpoint”, PID can still be
disabled by select programmable digital input options (parameters t062
, t063,
t065
...t068 [DigIn TermBlk xx]) such as “Purge”.
A460
and A472 [PID x Fdback Sel] are used to select the source of the PID
feedback.
Analog PID Reference Signals
Parameters t091 [Anlg In 0-10V Lo] and t092 [Anlg In 0-10V Hi] are used to
scale or invert an analog PID Reference or PID Feedback.
Scale Function
For a 0...5V signal, the following parameter settings are used so that a 0V signal =
0% PID Reference and a 5V signal = 100% PID Reference.
• t091 [Anlg In 0-10V Lo] = 0.0%
• t092 [Anlg In 0-10V Hi] = 50.0%
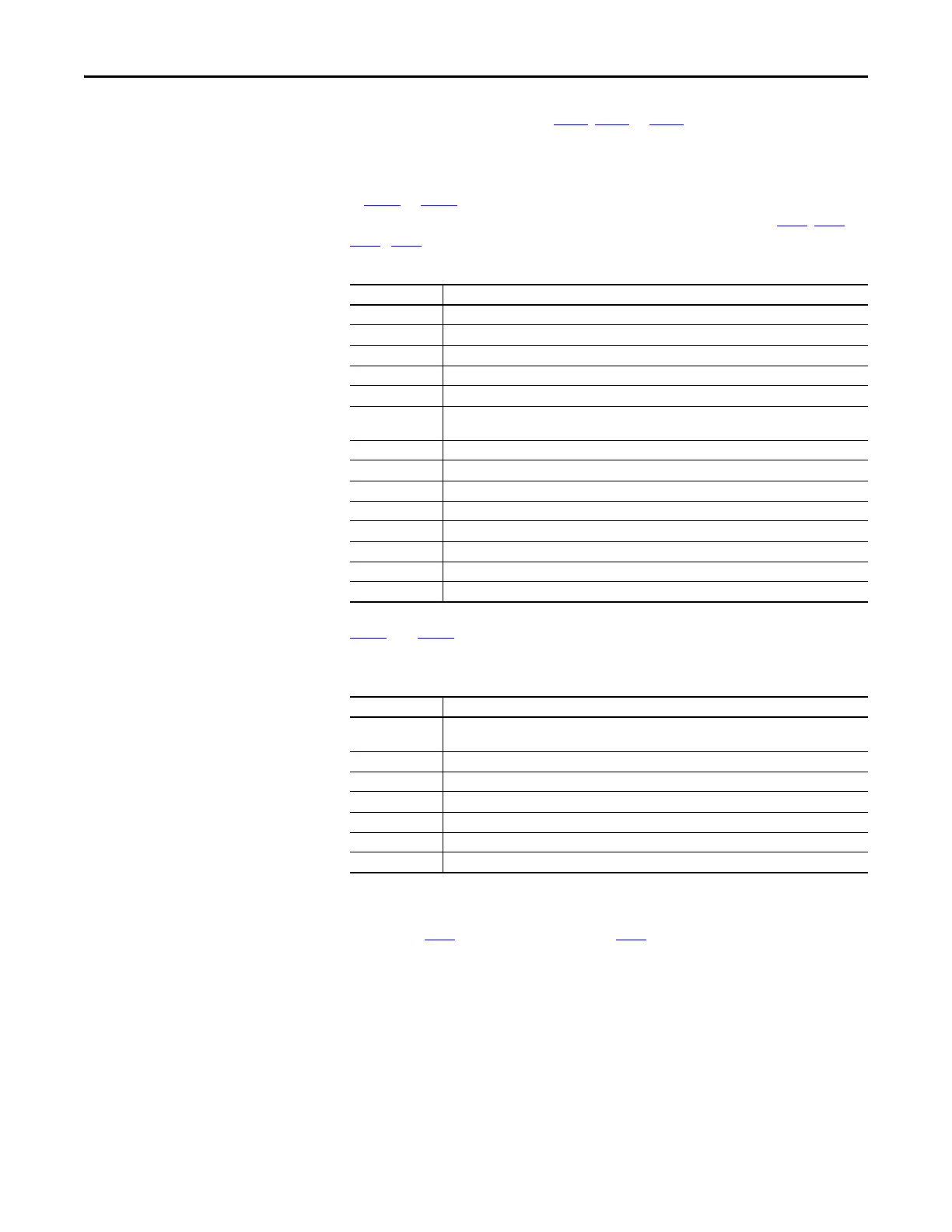
A459, A471 [PID x Ref Sel] Options
Options Description
0 “PID Setpoint“ A464 or A476 [PID x Setpoint] will be used to set the value of the PID Reference.
1 “Drive Pot” The drive potentiometer will be used to set the value of the PID Reference.
2 “Keypad Freq” The drive keypad will be used to set the value of the PID Reference.
2 ”Serial/DSI” The reference word from the Serial/DSI communication network becomes the PID Reference.
4 “Network Opt” The reference word from a communication network option becomes the PID Reference.
5 “0-10V Input” Selects the 0-10V Input. Note that the PID will not function with a bipolar analog input. It will
ignore any negative voltages and treat them like a zero.
6 “4-20mA Input” Selects the 4-20 mA Input.
7 “Preset Freq” A410...A425 [Preset Freq x] will be used as an input for the PID Reference.
8 “AnlgIn Multi” The product of the 0-10V and 4-20mA Inputs will be used as an input for the PID Reference.
9 “MOP Freq” A427 [MOP Freq] will be used as an input for the PID Reference.
10 ”Pulse Input” Pulse train will be used as an input for the PID Reference.
11 “Step Logic” Step Logic will be used as an input for the PID Reference.
12 “Encoder” Encoder will be used as an input for the PID Reference.
13 “Ethernet/IP” The reference word from the Ethernet/IP communication network becomes the PID Reference.
A460, A472 [PID x Fdback Sel] Options
Options Description
0 “0-10V Input” Selects the 0-10V Input (default setting). Note that the PID will not function with a bipolar analog
input. It will ignore any negative voltages and treat them like a zero.
1 “4-20mA Input“ Selects the 4-20 mA Input.
2 “Serial/DSI” Serial/DSI will be used as an input for the PID Feedback.
3 “Network Opt” The reference word from a communication network option becomes the PID Reference.
4 “Pulse Input” Pulse train will be used as an input for the PID Feedback.
5 “Encoder” Encoder will be used as an input for the PID Feedback.
6 “Ethernet/IP” Ethernet/IP will be used as an input for the PID Feedback.

 Loading...
Loading...













