ctrlX SAFETY "SafeMotion"
13.4.1 XG20, digital motor encoder connection
Table 46: XG20, digital motor encoder
View Connec-
tion
Signal name Function
1 n.c. -
2 GND_Enc Reference potential for power sup-
plies
3 +12V_Enc Encoder supply 12 V
4 n.c. -
5 Enc_Data+ Data transfer positive
6 Enc_Data- Data transfer negative
Properties Unit min. max.
Connection cable
Stranded wire
mm
2
0.25 0.5
Encoder evaluation type ACURO®link
ctrlX SENSEmotor
Connectors/cables not included in scope of delivery.
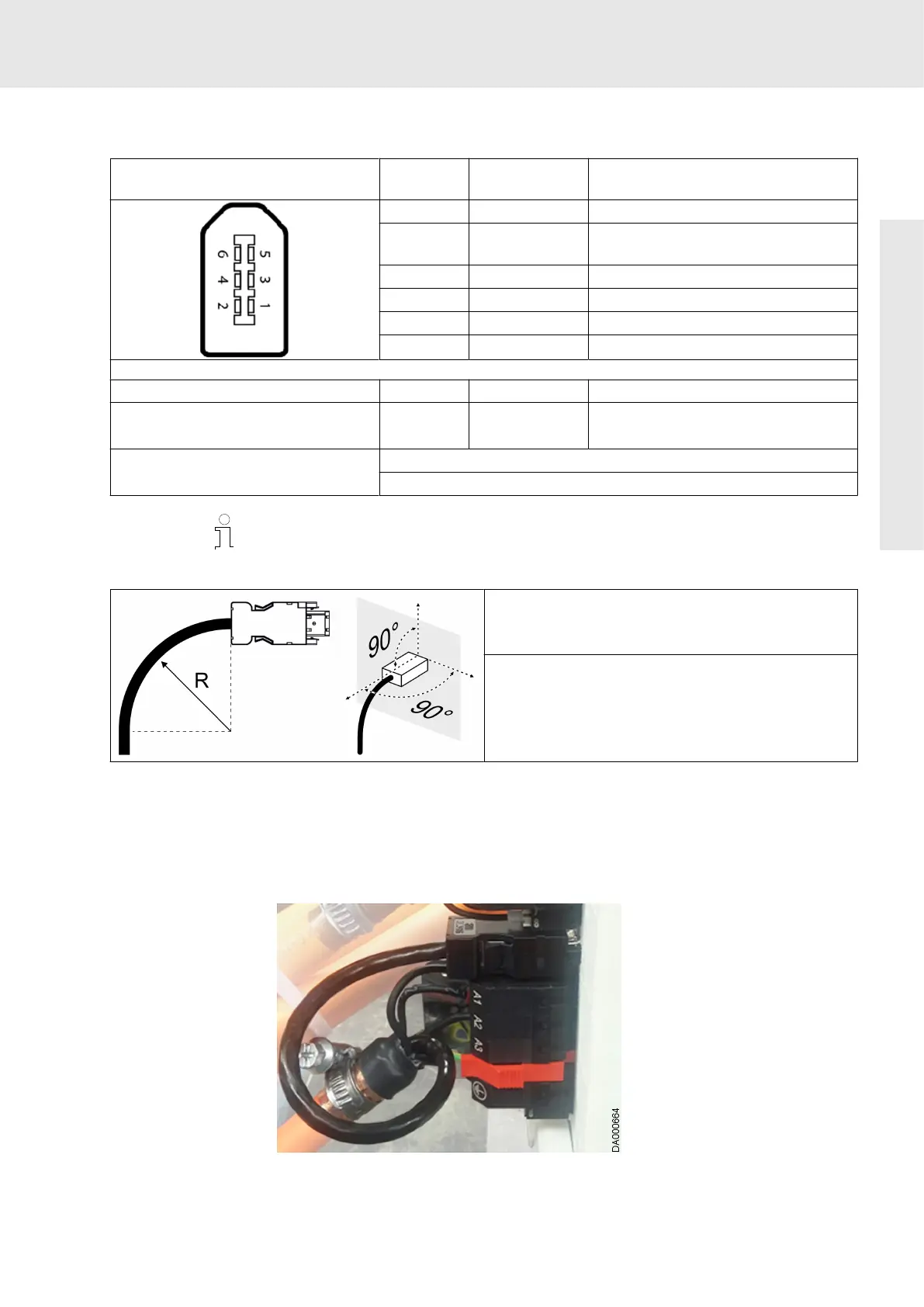
Table 47: Encoder connection
R ≈ 30 mm
Minimum bending radius (4 ´ outer cable diam-
eter)
90°
For permanently stable contact, the connector
has to be in a vertical position.
Install a strain relief so that no force is applied to
the connector.
Encoder connection for hybrid cables
Hybrid cables (e.g., RHB2‑021DDB) connect the drive controller to the motor
(XZ03) and encoder (XG20).
Form a loop to lead the encoder cable to the connection point XG20 so that no
force is applied to the encoder connector:
Fig. 120: Encoder cable forming a loop to be led to connection point XG20

 Loading...
Loading...





