ctrlX SAFETY "SafeMotion"
1 About this documentation
With “SafeMotion” in ctrlX DRIVE, universally parameterizable safety functions
for safe motion or standstill monitoring are provided.
● The purpose of this document is to get familiar with the “SafeMotion” safety
functions in the ctrlX DRIVE product line.
● The safety function characteristics, as well as information about the wiring,
commissioning and for the intended and safe operation as well as debugging
can be found in this section.
●
The content is intended for users configuring, commissioning and operating
functionally secure products.
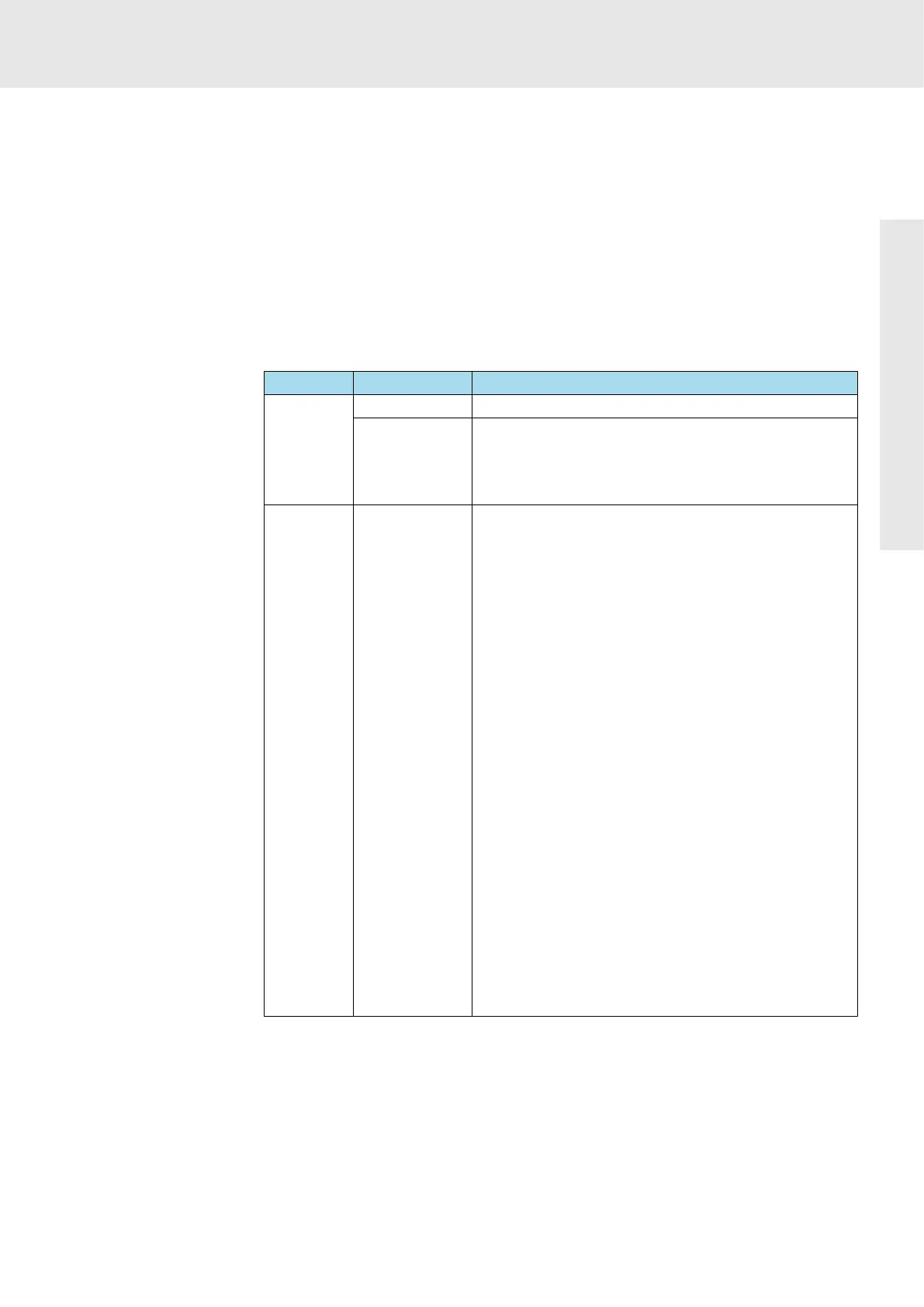
Editions of this documentation
Edition Release date Comment
01 2020‑11‑30 Edition for the certification date for RM21.11
2022‑02‑10 Revised editor for the certification date for
RM21.11
● Dynamization
●
...
02 2022‑04‑22 Revised edition for the EnDat 2.2 certification
date:
● ⮫ PFH value for XG21/EnDat 2.2 (chapter
“Optional safety technology module "M5"”)
●
⮫ Chapter “Encoder evaluation"
●
⮫ Chapter "Configuring the SMO encoder"
●
Description of the encoder interfaces added
– ⮫ Chapter 13.4.1 XG20, digital motor
encoder connection on page 273
– ⮫ Chapter 13.4.2 XG21, multi-encoder
on page 274
● Requirements for use extended:⮫ Chapter
Third-party motors/optional measuring systems
on page 168
Other changes:
●
⮫ Declaration of conformity inserted
●
It has to be ensured that the encoder assign-
ment of the axis is not interchanged when
replacing drive components:
–
⮫ Chapter 11.2.1 Replacing the motor
on page 243
– ⮫ Chapter 11.2.3 Replacing the optional
encoder on page 244
– ⮫ Chapter 11.2.5 Replacing the cables
on page 245

 Loading...
Loading...





