Chapter 17 Safe Torque Off Function C2000
17-2
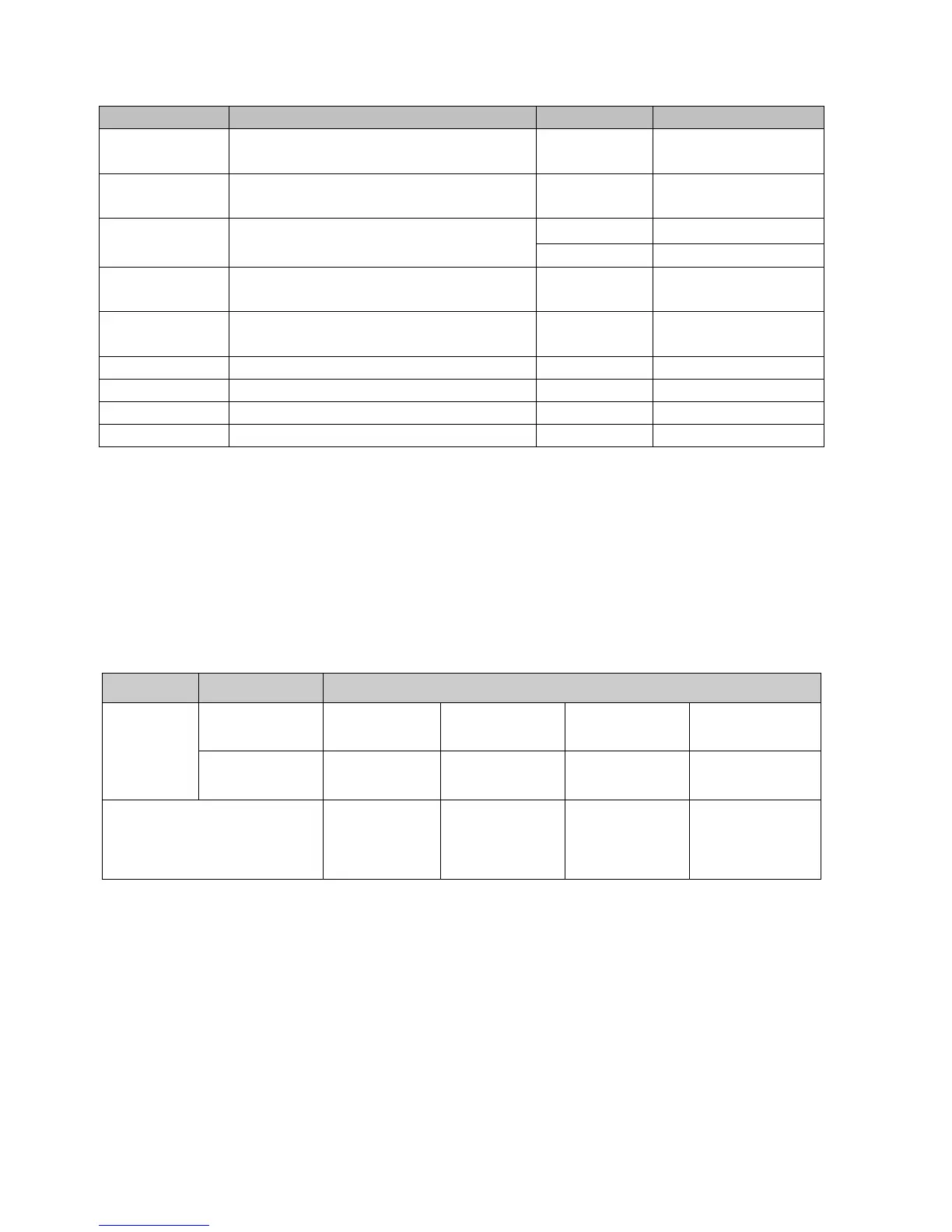
17-1 The Drive Safety Function Failure Rate
Item Definition Standard Performance
SFF Safe Failure Fraction IEC61508
Channel 1: 80.08%
Channel 2: 68.91%
HFT (Type A
subsystem)
Hardware Fault Tolerance IEC61508 1
SIL Safety Integrity Level
IEC61508 SIL 2
IEC62061 SILCL 2
PFH
Average frequency of dangerous failure
[h-1]
IEC61508 9.56×10
-10
PFD
av
Probability of Dangerous Failure on
Demand
IEC61508 4.18×10
-6
Category Category ISO13849-1 Category 3
PL Performance level ISO13849-1 d
MTTF
d
Mean time to dangerous failure ISO13849-1 High
DC Diagnostic coverage ISO13849-1 Low
17-2 Safety Torque Off Terminal Function Description
The Safe Torque Off function (STO) is to cut off the power supply to motor through the hardware,
thereby the motor couldn’t produce torque.
The STO function controls the motor current driving signal through two hardware circuits respectively,
and thus cut off the inverter power module output in order to achieve the status of safety stop.
Operation principle Description as following table 1:
Table 1: Terminal operation description
Signal Channel Photo-coupler status
STO signal
STO1–SCM1 ON (High) ON (High) OFF (Low) OFF (Low)
STO2–SCM2 ON (High) OFF (Low) ON (Low) OFF (Low)
Driver Output status Ready
STL2 mode
(Torque output
off)
STL1 mode
(Torque output
off)
STO mode
(Torque output
off)
STO means Safe Torque Off
STL1–STL3 means Safe Torque Off hardware abnormal.
STL3 means STO1–SCM1 and STO2–SCM2 internal circuit detected abnormal.
STO1–SCM1 ON (High): means STO1–SCM1has connection to a +24V
DC
power supply.
STO2–SCM2 ON (High): means STO2–SCM2 has connection to a +24V
DC
power supply.
STO1–SCM1 OFF (Low): means STO1–SCM1hasn’t connection to a +24V
DC
power supply.
STO2–SCM2 OFF (Low): means STO2–SCM2hasn’t connection to a +24V
DC
power supply.
 Loading...
Loading...





