Chapter 11 Summary of Parameter SettingsC2000
11-47
10 Feedback Control Parameters
NOTE
IM: Induction Motor; PM: Permanent Magnet Motor
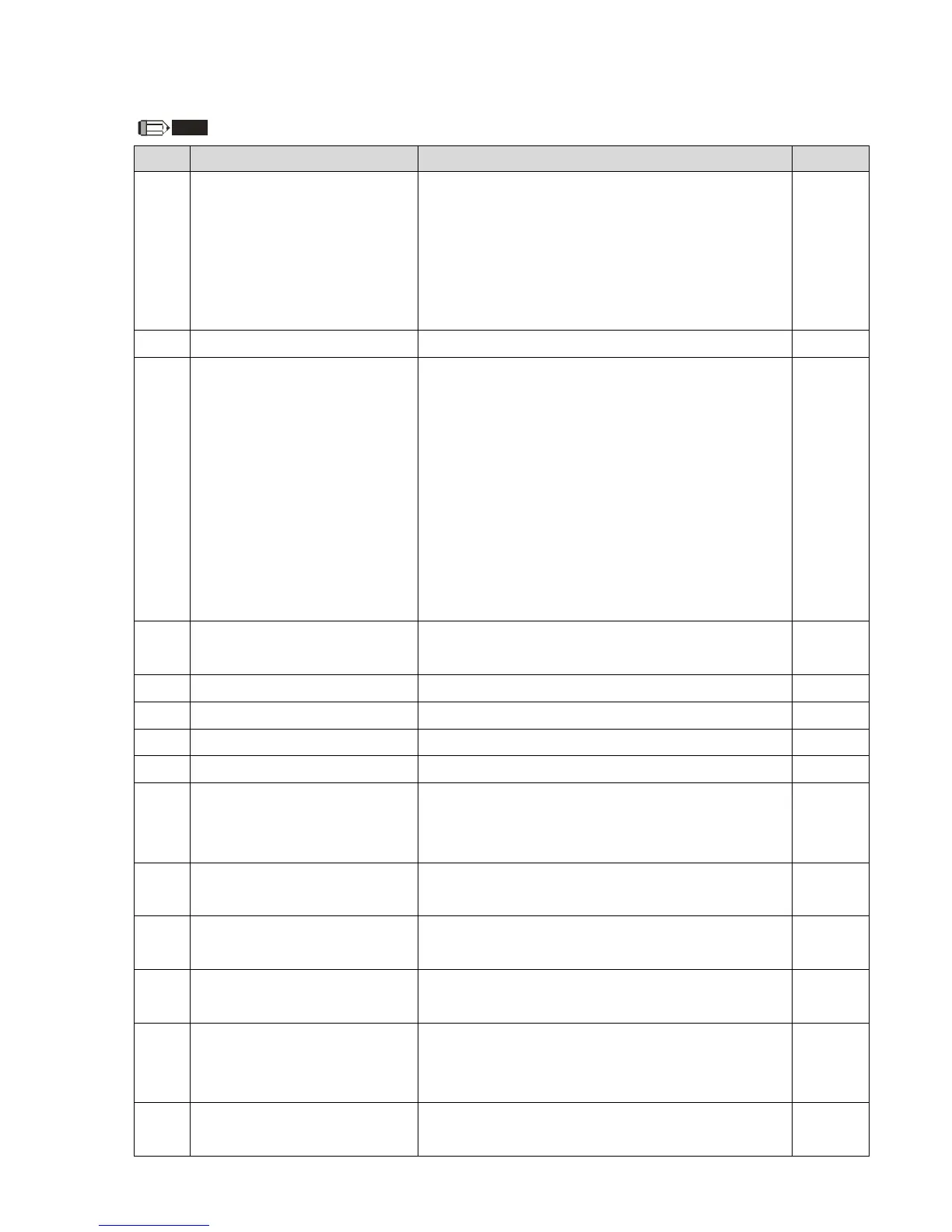
Pr. Parameter Name Setting Range Default
10-00 Encoder type selection
0: Disable
1: ABZ
2: ABZ (Delta encoder for Delta servo motor)
3: Resolver
4: ABZ / UVW
5: MI8 single phase pulse input
0
10-01 Encoder pulses per revolution 1–20000 600
10-02 Encoder input type setting
0: Disable
1: Phases A and B are pulse inputs, forward direction if
A-phase leads B-phase by 90 degrees
2: Phases A and B are pulse inputs, forward direction if
B-phase leads A-phase by 90 degrees
3: Phase A is a pulse input and phase B is a direction
input (L = reverse direction, H = forward direction)
4: Phase A is a pulse input and phase B is a direction
input (L = forward direction, H = reverse direction)
5: Single-phase input
0
10-03
Frequency division output
setting (denominator)
1–255 1
10-04 Electrical gear at load side A1 1–65535 100
10-05 Electrical gear at motor side B1 1–65535 100
10-06 Electrical gear at load side A2 1–65535 100
10-07 Electrical gear at motor side B2 1–65535 100
10-08
Treatment for encoder / speed
observer feedback fault
0: Warn and continue operation
1: Warn and ramp to stop
2: Warn and coast to stop
2
10-09
Detection time of encoder /
speed observer feedback fault
0.0–10.0 sec.
0: Disable
1.0
10-10
Encoder / speed observer stall
level
0–120%
0: No function
115
10-11
Detection time of encoder /
speed observer stall
0.0–2.0 sec. 0.1
10-12
Encoder / speed observer stall
action
0: Warn and continue operation
1: Warn and ramp to stop
2: Warn and coast to stop
2
10-13
Encoder / speed observer slip
range
0–50%
0: No function
50
 Loading...
Loading...





