Chapter 11 Summary of Parameter SettingsC2000
11-14
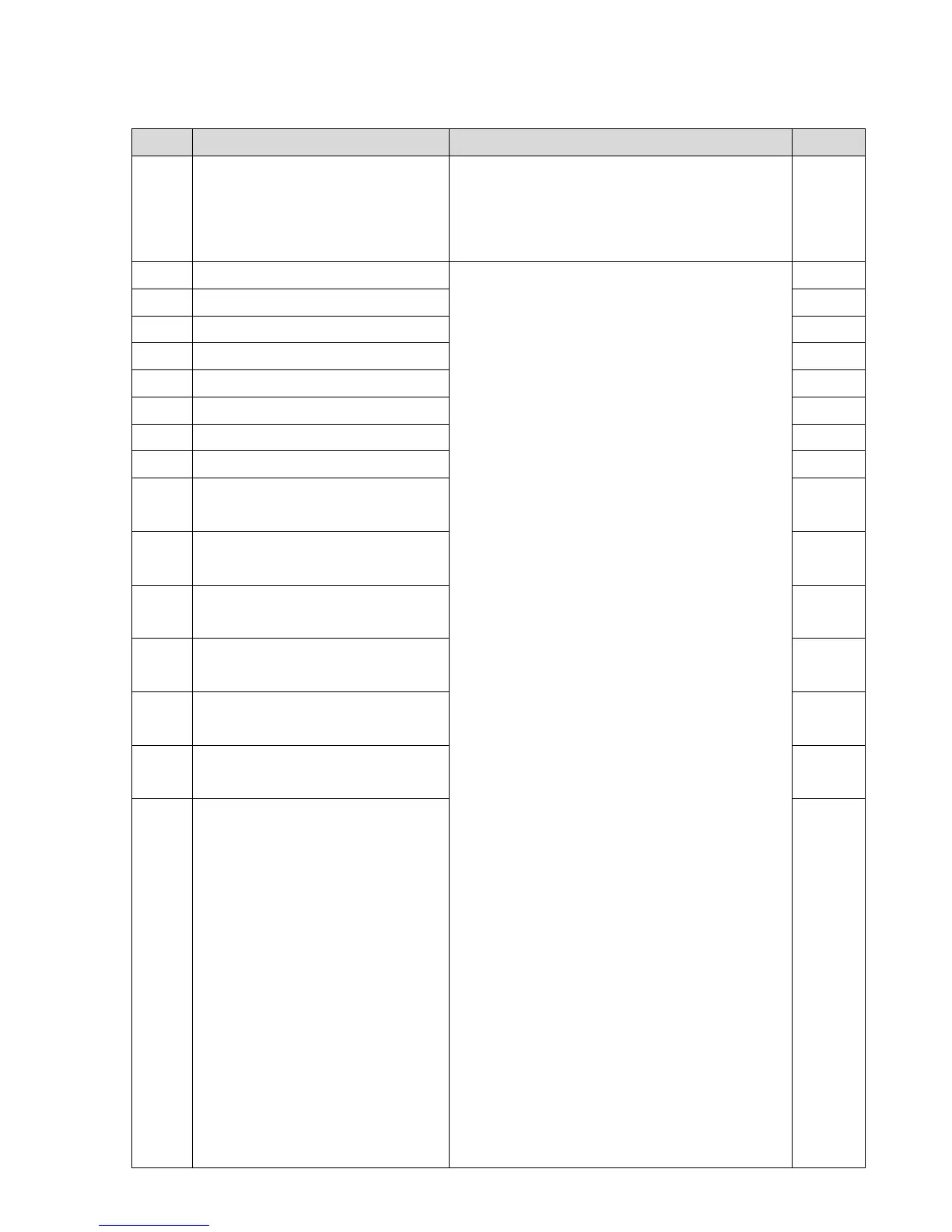
02 Digital Input / Output Parameters
Pr. Parameter Name Setting Range Default
02-00
Two-wire / Three-wire operation
control
0: Two-wire mode 1, power on for operation control
1: Two -wire mode 2, power on for operation
control
2: Three-wire, power on for operation control
0
02-01 Multi-function input command 1 (MI1) 0: No function 1
02-02 Multi-function input command 2 (MI2) 1: Multi-step speed command 1 / multi-step 2
02-03 Multi-function input command 3 (MI3) position command 1 3
02-04 Multi-function input command 4 (MI4) 2: Multi-step speed command 2 / multi-step 4
02-05 Multi-function input command 5 (MI5) position command 2 0
02-06 Multi-function input command 6 (MI6) 3: Multi-step speed command 3 / multi-step 0
02-07 Multi-function input command 7 (MI7) position command 3 0
02-08 Multi-function input command 8 (MI8) 4: Multi-step speed command 4 / multi-step 0
02-26
Input terminal of I/O extension card
(MI10)
position command 4
5: Reset
0
02-27
Input terminal of I/O extension card
(MI11)
6: JOG command (By KPC-CC01 or external
control)
0
02-28
Input terminal of I/O extension card
(MI12)
7: Acceleration / deceleration speed inhibit
8: 1
st
and 2
nd
acceleration / deceleration time
0
02-29
Input terminal of I/O extension card
(MI13)
selection
9: 3
rd
and 4
th
acceleration / deceleration time
0
02-30
Input terminal of I/O extension card
(MI14)
selection
10: EF input (Pr. 07-20)
0
02-31
Input terminal of I/O extension card
(MI15)
11: Base Block (B.B) input from external
12: Output stop
0
13: Cancel the setting of auto-acceleration /
auto-deceleration time
14: Switch between motor 1 and motor 2
15: Rotating speed command from AVI
16: Rotating speed command from ACI
17: Rotating speed command from AUI
18: Forced to stop (Pr. 07-20)
19: Digital up command
20: Digital down command
21: PID function disabled
22: Clear the counter
23: Input the counter value (MI6)
24: FWD JOG command
25: REV JOG command
 Loading...
Loading...





