DVP-ES2/EX2/EC5/SS2/SA2/SX2/SE&TP Operation Manual - Programming
9. Each ID has an independent flag to decelerate to stop (M1632-M1639).
10. Each ID has a corresponding register (D6032-D6047) to store the current position.
11. Refer to the following table for the corresponding SM and SR of the axes.
12. Any error occurs during operation, M1616 will be set to ON and the servo drive number that
shows error will be stored in D6000, error codes in D6001 and STEP that when error occurs in
D6002.
13. Go-back and go-forth functions are included. Each ID has a corresponding flag
(M1648-M1655) to be used for you to enable or disable these functions and flags
(M1656-M1663) to indicate the direction to go-back or go-forth.
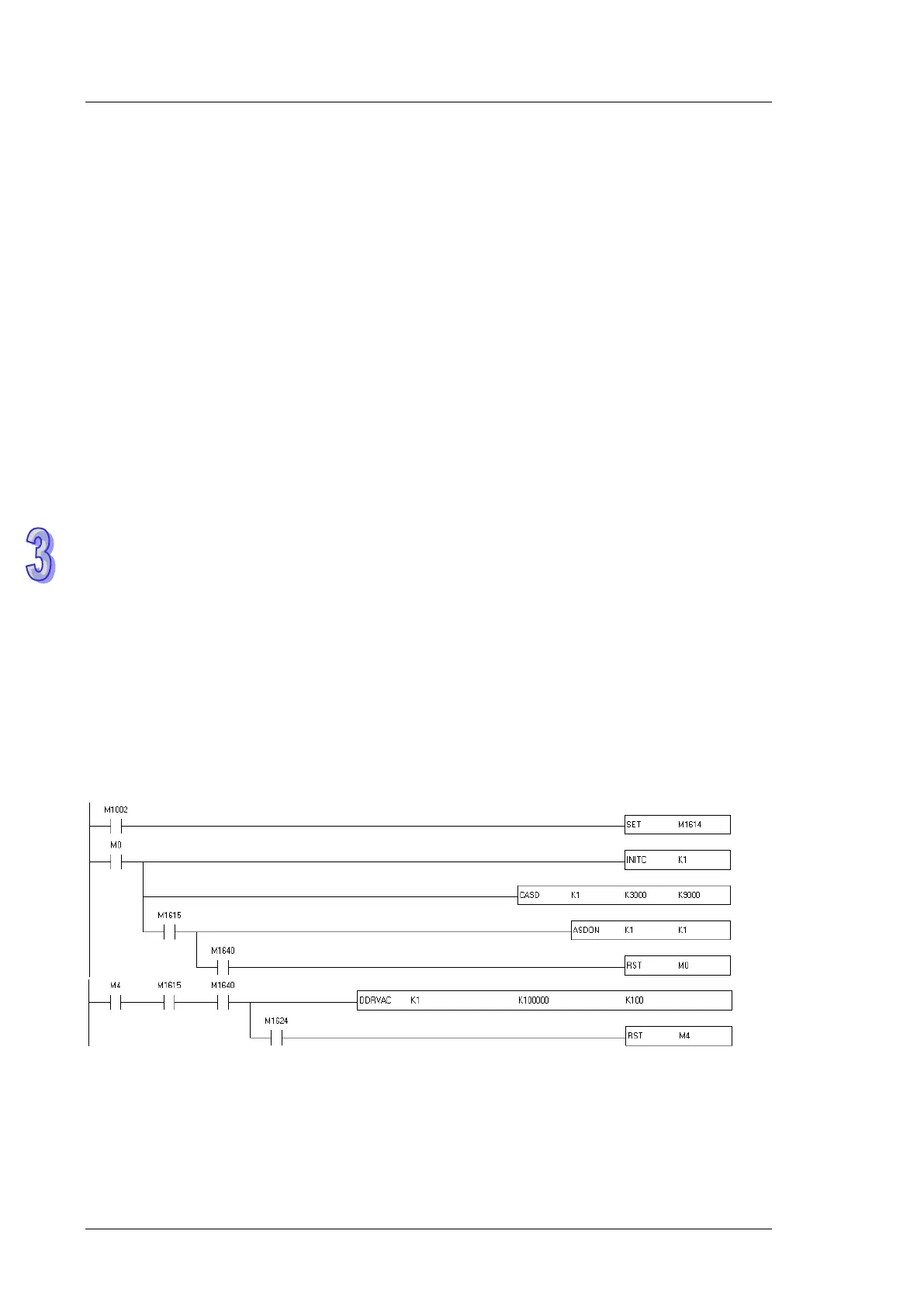
Example 1:
1. When M0 changes from OFF to ON, the INITC instruction starts to initialize the servos at
station addresses 1–3 (should be in a consecutive order) The station address must start at 1
and the following addresses cannot be skipped or reserved. Set the acceleration time of servo
1 to 3000 ms and the deceleration time to 9000 ms, until M1615 is ON.
2. When M1615 is ON, the instruction starts enable the servo at station 1 and SM1640 is ON,
indicating Servo-ON.
3. When M4 changes from OFF to ON, servo at station 1 moves to the relative position 100000
PUU at 100.0 rpm. The finish flag SM1624 is ON when the target position is reached.
 Loading...
Loading...









