Setup & Operation 5. Motion Range
56 LS20 Rev.4
5.2.2 Setting the Mechanical Stop of Joint #3
This method applies only to the Standard-model manipulator (LS20-**4S).
For the Cleanroom-model (
LS20-**4C), the motion range set with the Joint #3 mechanical
stop cannot be changed.
Turn ON the Controller and turn OFF the motors using the Motor OFF command.
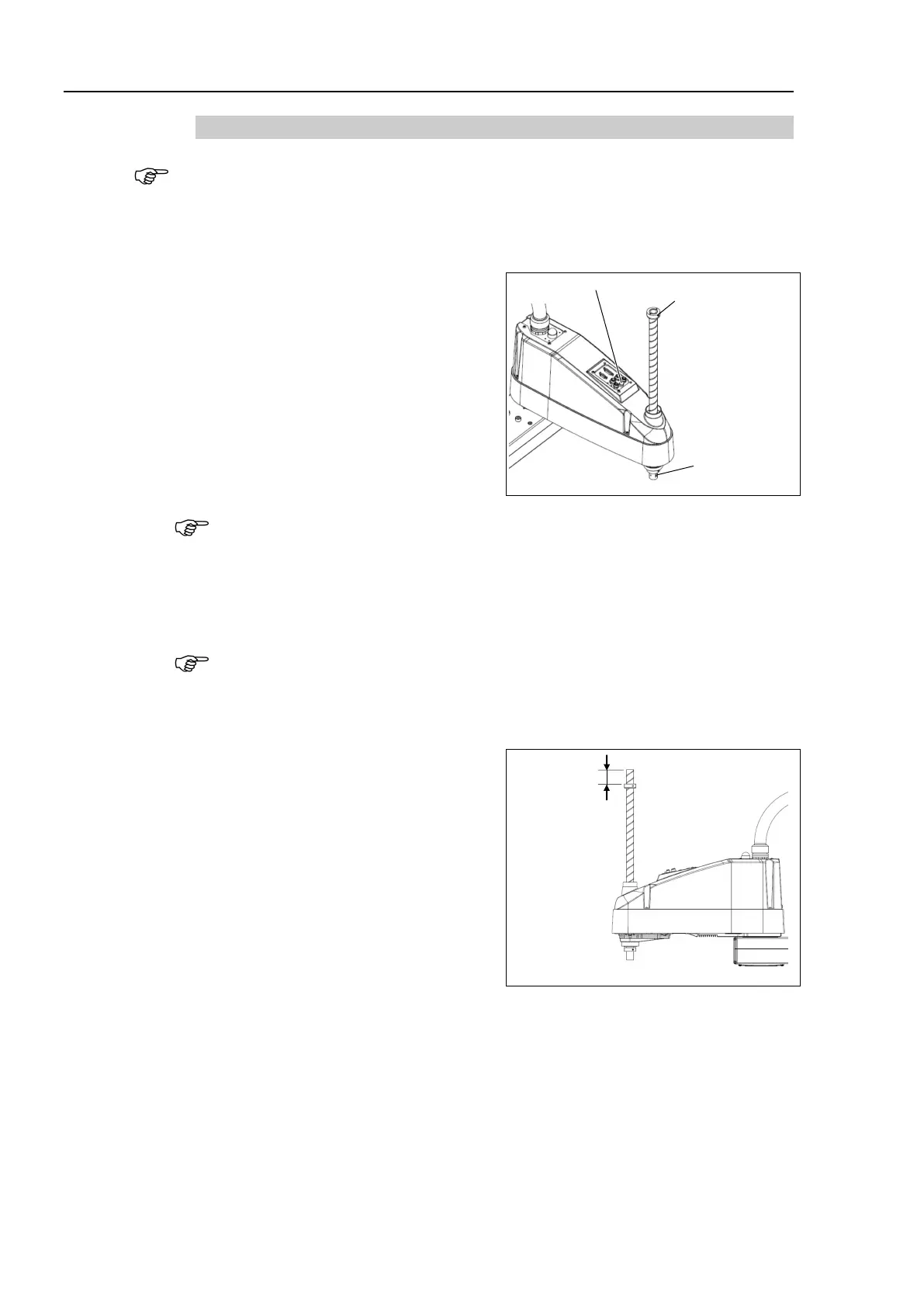
Push up the shaft while pressing the
brake release
switch.
Do not push the shaft up to its upper
limit or it will be difficult for the arm
top cover to be removed. Push the
shaft up to a position where the Joint #3
mechanical stop can be changed.
Lower limit
mechanical
stop screw
2-M5×6 set screw
+ 2-M5 bush
the brake release switch, the shaft may lower due to the weight of
Be sure to hold the shaft by hand while pressing the button.
Controller.
Loosen the lower limit mechanical stop screw (
2-M5×6 set screw).
A mechanical stop is mounted on both the top and bottom of Joint #3. However, only
the position of the lower limit mechanical stop on the top can be changed.
Do not
remove the upper limit mechanical stop on the bottom because the calibration point of
Joint #3 is specified
using the stop.
The upper end of the shaft
defines the
Move the lower
limit mechanical stop down by the
length you want to limit the stroke.
For example, when the lower limit
mechanical stop is set at “
420 mm”
stroke, the lower limit Z coordinate
value is “
-420”. To change the value
-100
”, move the lower limit
mechanical stop down
“320 mm”. Use
calipers to measure the distance when
adjusting
the mechanical stop.
Firmly tighten the lower limit mechanical stop screw (2
-M5×6 set screw).
Recommended tightening torque:
3.9 N⋅m (39.8 kgf⋅cm)
Controller.
 Loading...
Loading...







