Chapter 3 Wiring of Servo System IS620P User Manual
- 60 -
Make sure the differential input is 5 V. Otherwise, input pulses of the servo drive are unstable,
which will cause:
•
When the reference pulse is input, pulse loss occurs.
•
When reference direction is input, the direction will reverse.
The 5V ground of the host controller must be connected to GND terminal of the servo drive to
reduce noise interference.
3.3.4 Encoder Frequency Dividing Output Circuit
Signal
Default
Function
Pin No. Function Description
Common
PAO+
PAO-
21
22
Phase A output signal
Phases A+B quadrature pulse
output signal
PBO+
PBO-
25
23
Phase B output signal
PZO+
PZO-
13
24
Phase Z output signal Origin pulse output signal
PZ-OUT 44 Phase Z output signal Origin pulse OC output signal
GND 29 Origin pulse OC output signal ground
Common
+5V 15
5 V internal power supply:
Maximum output current: 200 mA
GND 16
PE Housing
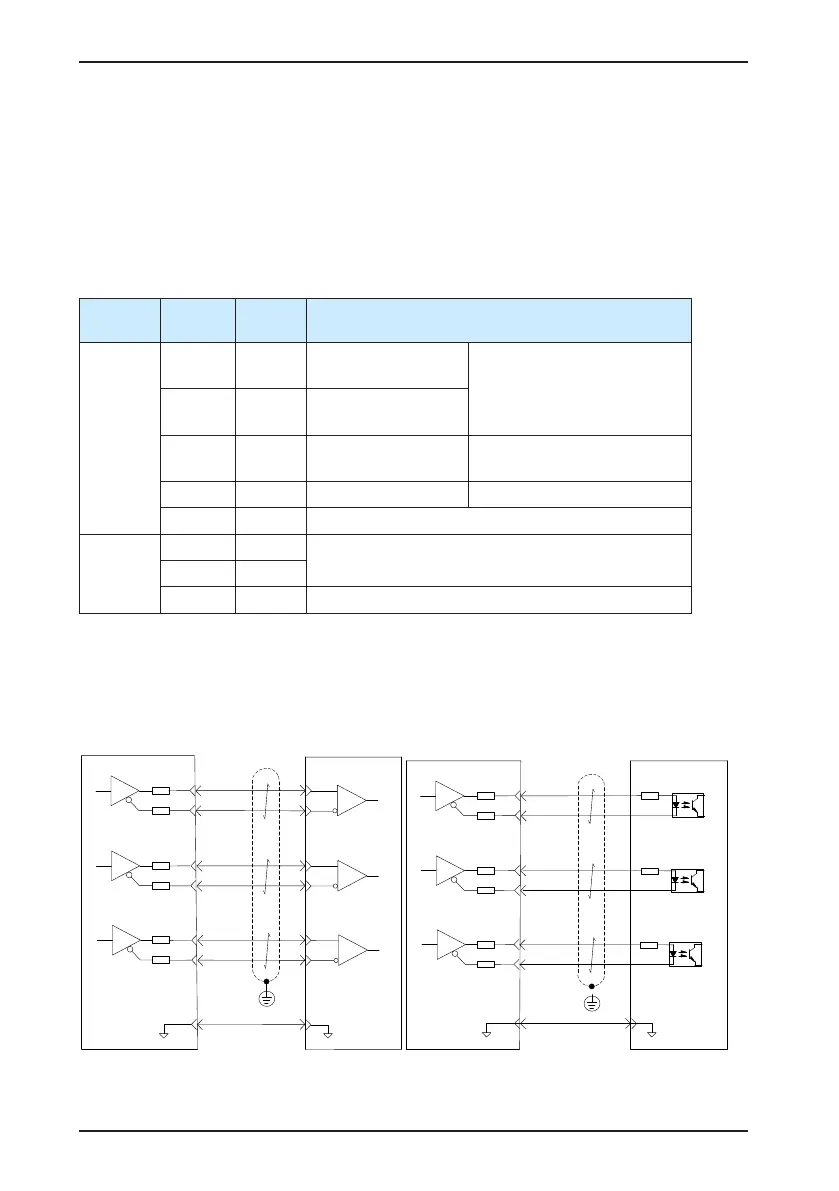
Encoder frequency dividing output circuit outputs differential signals via differential drive.
Normally, the encoder output circuit provides feedback signals to the host controller. The
circuit and the host controller together form a closed-loop position control system. A differential
or optocoupler circuit shall be used in the host controller to receive feedback signals. The
maximum output current is 20 mA.
Servo drive
21
22
PAO+
PAO-
25
23
PBO+
PBO-
13
24
PZO+
PZO-
GND
29
GND
Host computer
Max. output current: 20 mA
36 Ω
36 Ω
36 Ω
36 Ω
36 Ω
36 Ω
Servo drive
21
22
PAO+
PAO-
25
23
PBO+
PBO-
13
24
PZO+
PZO-
Max. output current: 20 mA
Optocoupler
GND
29
GND
Host computer
36 Ω
36 Ω
36 Ω
36 Ω
36 Ω
36 Ω
 Loading...
Loading...
