IS620P User Manual Chapter 4 Running and Commissioning
- 79 -
Function
Code
Parameter Name Setting Range Unit Default
Effective
Time
Property
Control
Mode
H05 07
Electronic gear ratio
1 (numerator)
1–1073741824 - 1048576 Immediate
During
running
P
H05 09
Electronic gear 1
(denominator)
1–1073741824 - 10000 Immediate
During
running
P
H05 11
Gear ratio 2
(numerator)
1–1073741824 - 1048576 Immediate
During
running
P
H05 13
Gear ratio 2
(denominator)
1–1073741824 - 10000 Immediate
During
running
P
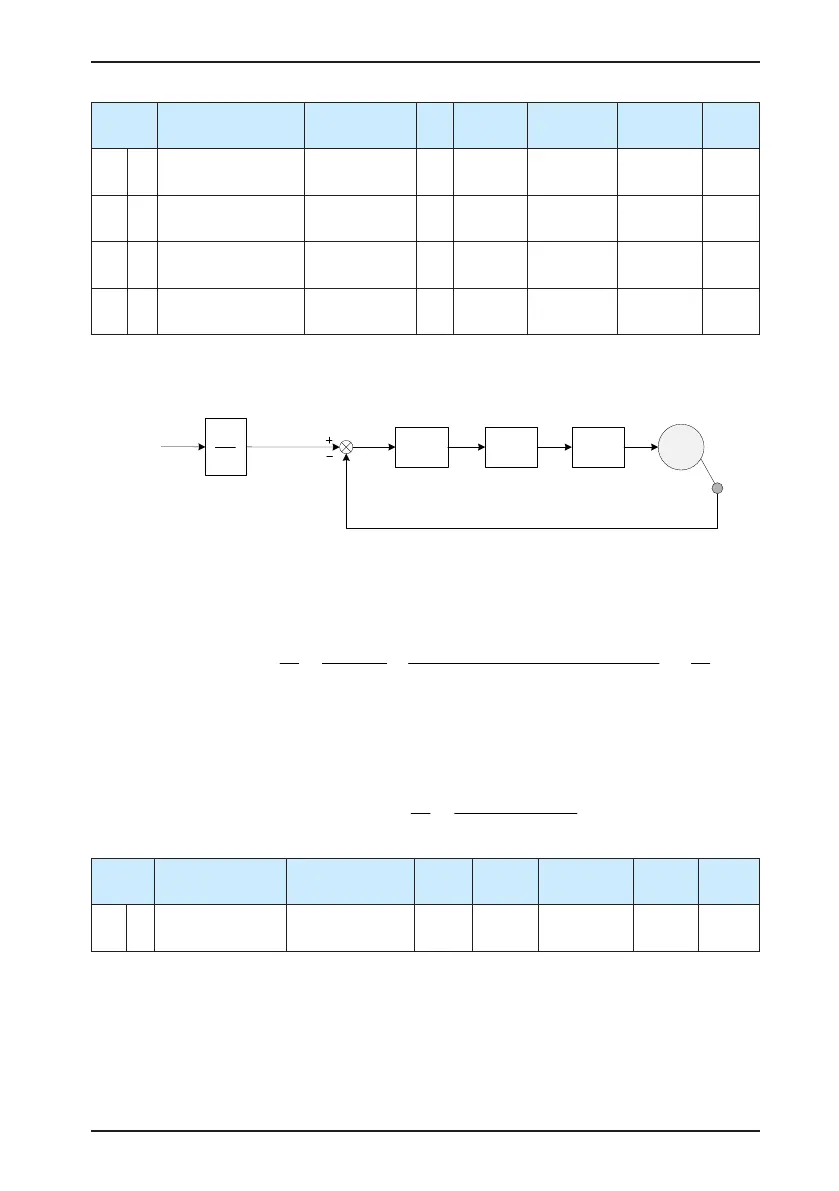
The following gure shows the working principle of the electronic gear ratio.
Figure 4-3 Working principle of the electronic gear ratio
Position
loop
B
A
Position reference
(reference unit)
PMSM
PG
Speed
loop
Current
loop
Position feedback (pulses)
Position
reference
(pulses)
When H05-02 is 0 and the motor is connected to the load through the reduction gear, assume
that the reduction ratio between the motor shaft and the load mechanical side is n/m (the load
shaft rotates n revolutions when the motor shaft rotates m revolutions), and the formula of
calculating the electronic gear ratio is as follows:
Electronic gear ratio
B
A
=
H05-07
H05-09
Encoder resolution
Displacement (command unit) when
the load shaft rotates one revolution
m
n
x
=
The IS620P supports two electronic gear ratios, which can be switched over by using the
function FunIN.24.
When H05 ≠ 0:
Electronic gear ratio
B
A
=
Encoder resolution
H05-02
Function
Code
Parameter Name Setting Range Unit Default
Effective
Time
Property
Control
Mode
H05 02
Pulses for one
motor revolution
0–1048576 P/Rev 0
Power-on
again
At stop P
When this parameter is set, the electronic gear ratio is irrelative to H05-07, H05-09, H05-11
and H05-13, and the electronic gear ratio switchover is not supported.
 Loading...
Loading...
