6. Description of Parameters
- 169 -
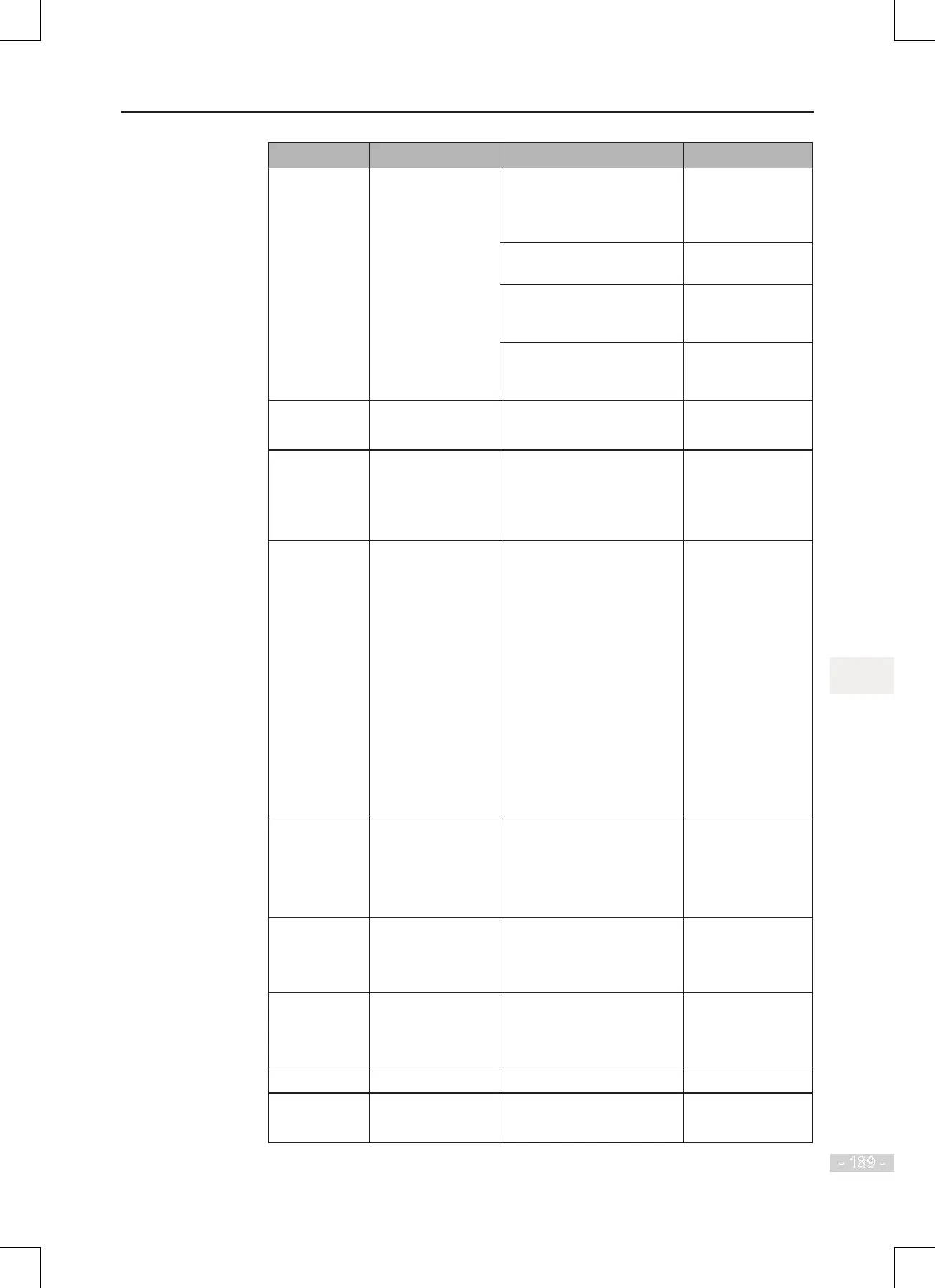
Function Code Parameter Name Setting Range Setting
A8-02
Selection of
action of the slave
in point-point
communication
000 to 111
0: No
1: Yes
Units position: whether to
follow masters command
1
Tens position: whether to
send fault information to
master when a fault occurs
1
Hundreds position: whether
to alarm when it becomes
ofine
-
A8-03
The slave received
data
0: Output frequency
1: Frequency reference
0
F0-02
Command source
selection
0: Operating panel control
(keypad & display)
1: Terminal I/O control
2: Serial comms.
2
F0-03
Main frequency
reference setting
channel selection
0: Digital setting (non-
retentive at power down)
1: Digital setting (retentive
at power down)
2: AI1
3: AI2
4: AI3
5: Pulse reference
6: Multi-reference
7: Simple PLC
8: PID reference
9: Serial comms.
9
F0-10
Max. frequency 5.00 to 500.00 Hz 50.00 Hz
Keep the same
setting of this
parameter for the
master and slave.
F0-17
Acceleration time 1 0.0 to 6500.0s Keep the same
setting of this
parameter for the
master and slave.
F0-18
Deceleration time 1 0.0 to 6500.0s Keep the same
setting of this
parameter for the
master and slave.
F8-15
Droop rate 0.00 to 10.00 Hz 1.00 Hz
A0-00
Speed/Torque
control selection
0: Speed control
1: Torque control
0

 Loading...
Loading...