6. Description of Parameters
- 103 -
FC-50 sets running time unit in simple PLC mode. FC-51 selects the setting channel of
reference 0.
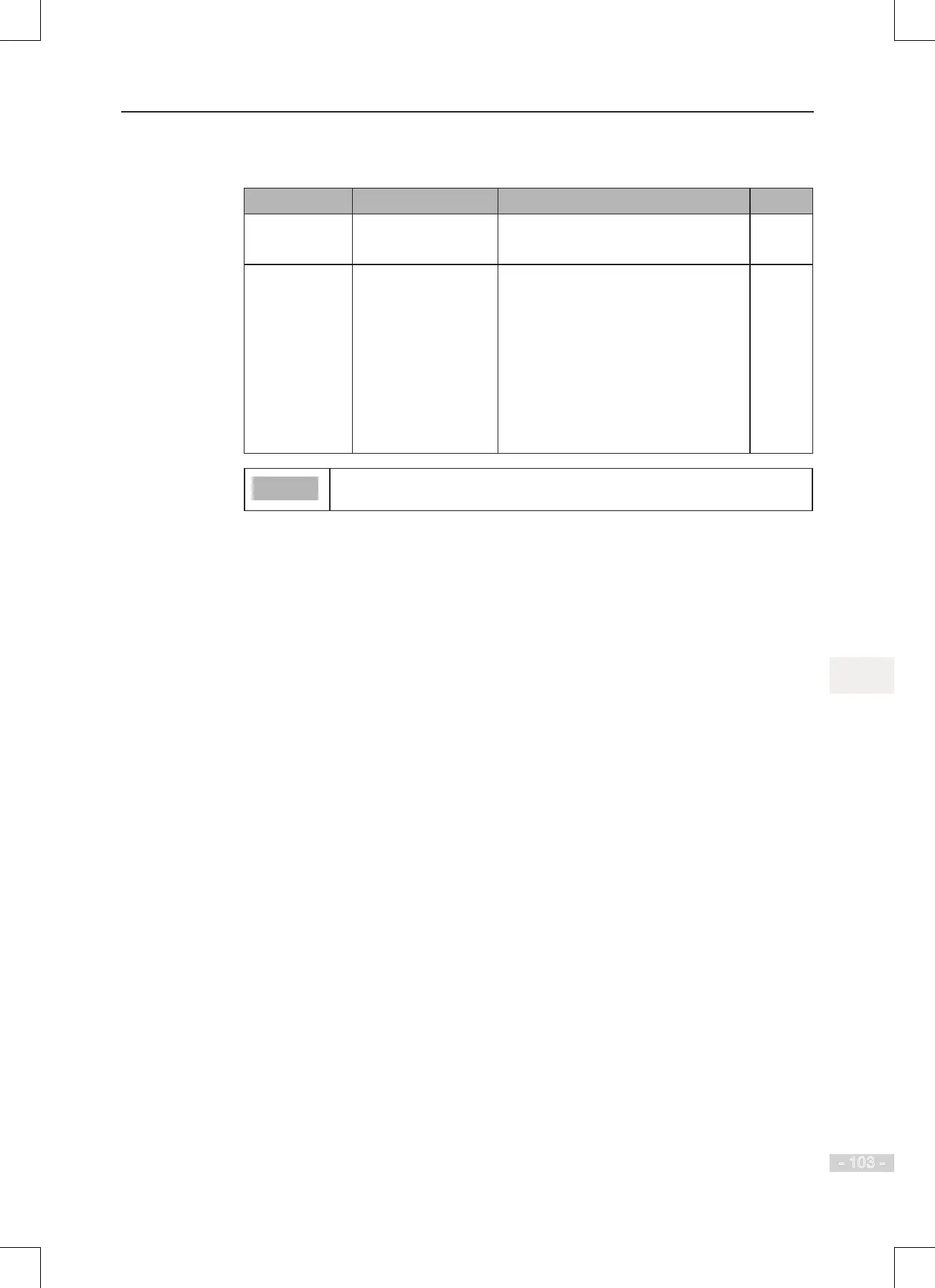
Function Code Parameter Name Setting Range Default
FC-50
Time unit of simple
PLC running
0: s (second)
1: h (hour)
0
FC-51
Reference 0 source 0: Set by FC-00
1: AI1
2: AI2
3: AI3
4: Pulse reference
5: PID
6: Set by preset frequency (F0-08),
modied via terminal UP/DOWN
0
Simple PLC can be either frequency reference setting channel or voltage
reference setting channel for V/F separation.
■
PID Reference
The PID (Proportional + Integral + Derivative) function uses system feedback for closed-
loop control of variables such as ow, pressure, temperature, and so on.
The purpose of PID control is to keep the drive output as close as possible to a desired
reference via PID adjustment.
● Proportional gain (Kp1)
A large value tends to reduce present error, but too large setting will cause system
oscillation.
● Integral time (Ti1)
The shorter the integral time is, the faster the error will be predicted. But too short
setting will cause overshoot or system oscillation.
● Derivative time (Td1)
The longer the derivative time is, the faster the system will respond to the error. But
too longer setting will cause vibration.
 Loading...
Loading...
