7. Interfaces and Communication
- 215 -
■
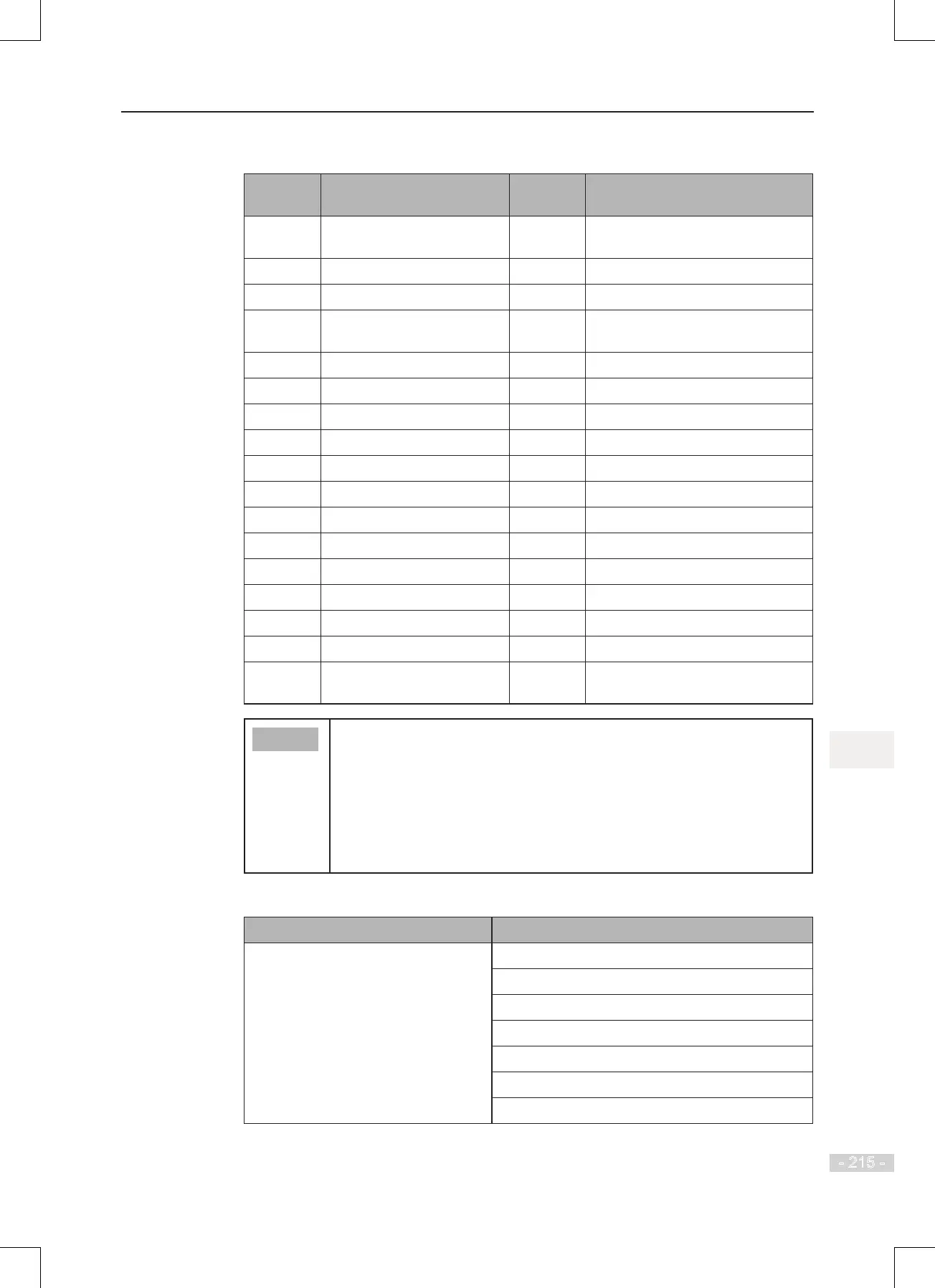
Stop/RUN Parameters
Parameter
Address
Description Parameter
Address
Description
1000 Communication setting value
(Decimal): -10000 to 10000
1010 PID reference
1001 Running frequency 1011 PID feedback
1002 Bus voltage 1012 PLC process
1003 Output voltage 1013 Pulse input frequency, unit: 0.01
kHz
1004 Output current 1014 Feedback speed, unit 0.1Hz
1005 Output power 1015 Remaining running time
1006 Output torque 1016 AI1 voltage before correction
1007 Running speed 1017 AI2 voltage before correction
1008 DI input indication 1018 AI3 voltage before correction
1009 DO output indication 1019 Linear speed
100A AI1 voltage 101A Current power-on time
100B AI2 voltage 101B Current running time
100C AI3 voltage 101C Pulse input frequency, unit 1Hz
100D Counting value input 101D Communication reference
100E Length value input 101E Actual feedback speed
100F Load speed 101F Main frequency reference display
- - 1020 Auxiliary frequency reference
display
● Communication setting value indicates percentage: 10000
corresponds to 100.00%, and -10000 corresponds to -100.00%.
● With regard to frequency, communication reference is a
percentage of F0-10 (maximum frequency).
● With regard to torque, communication reference is a percentage
of F2-10 and A2-48 (corresponding to motor 1 and motor 2,
respectively).
Control command input to AC drive (write-only):
Command Word Address Command Word Function
2000H 0001: Forward run
0002: Reverse run
0003: Forward jog
0004: Reverse jog
0005: Coast to stop
0006: Decelerate to stop
0007: Fault reset
 Loading...
Loading...
