
 Loading...
Loading...Do you have a question about the Inovance MD500 Series and is the answer not in the manual?
Describes the usage of Digital Input (DI) and Digital Output (DO) terminals.
Explains the meaning of warning, caution, and note symbols used in the manual.
Emphasizes extreme care when working with high voltages within the AC drive.
Outlines responsibilities for system design, installation, and safety.
Highlights electrical shock risks, stored energy, and safe practices.
Advises on parameter tuning by qualified personnel and potential risks.
Explains how model numbers identify specific characteristics and specifications.
Lists electrical and performance ratings including input, output, and frequency details.
Lists specifications for display, protections, and environmental operating conditions.
Details requirements for working temperature, cooling, and mounting location.
Illustrates clearance for multi-drive installations and air guide plate installation.
Details preparing the backplate for hole cut-out and installing the drive.
Shows a typical system connection diagram with optional components.
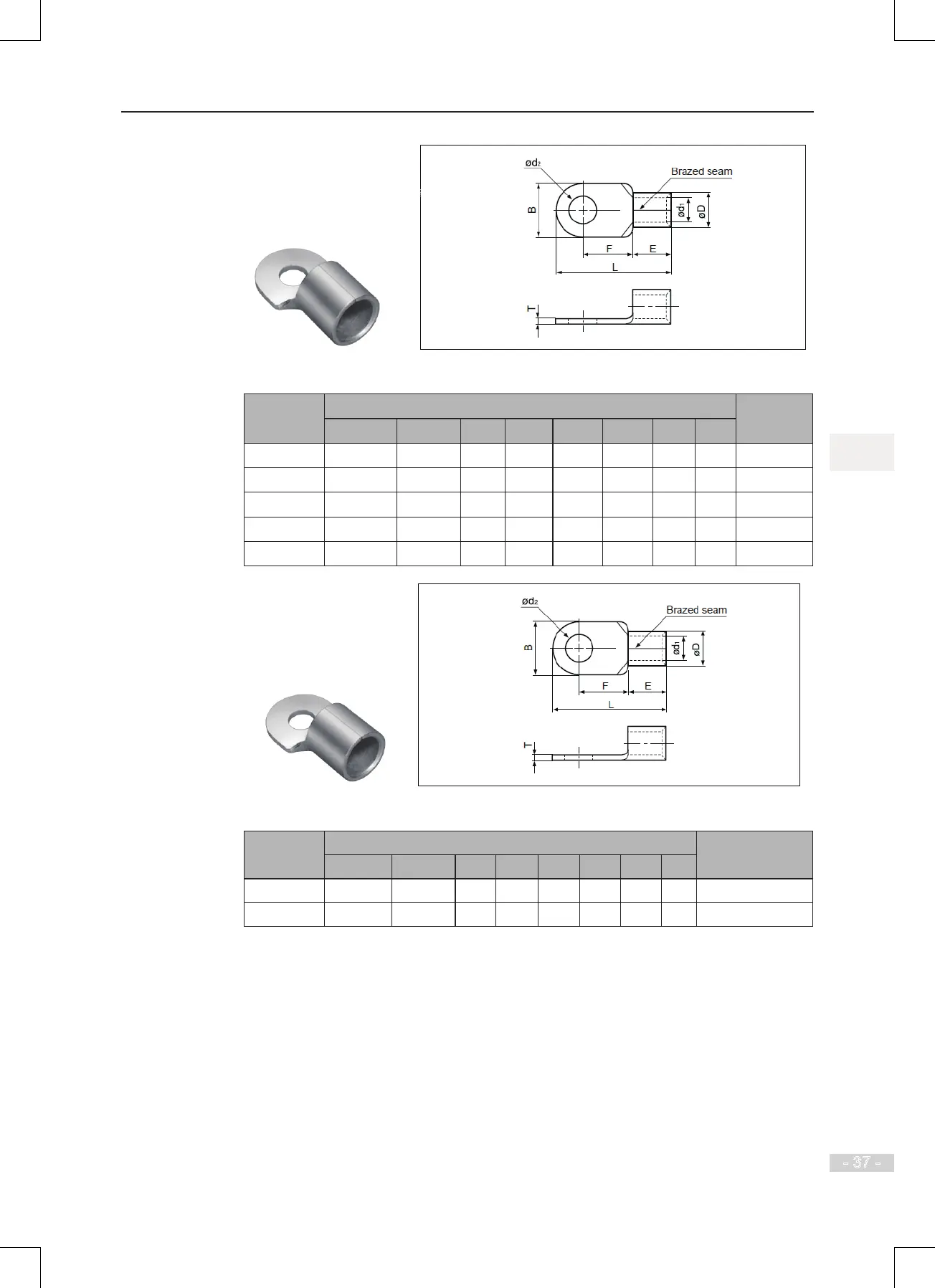
Details main circuit terminal arrangement and functions.
Details grounding (PE) connection requirements and best practices.
Covers main circuit cable protection and power input protection.
Illustrates control circuit terminal arrangement and lists terminals.
Explains wiring for digital inputs in SOURCE mode and wiring for DI5 high-speed pulse input.
Provides a comprehensive checklist for electrical installation.
Explains the function of each key on the LED operating panel.
Discusses editing function parameters and provides a table of often used parameters.
Covers saving parameter values, making backups, and restoring default settings.
Details the initial steps of setup, including parameter initialization and setting motor parameters.
Details selecting control mode, frequency reference channels (AI1, AI2), and their settings.
Details setting V/F curve parameters and performing a trial run.
Describes different start modes like direct start and catching a spinning motor.
Details control modes: operating panel, terminal I/O, and serial communication via F0-02.
Explains three-wire control mode 2, including wiring and sequence diagrams.
Details four methods to set frequency reference, including main and auxiliary references.
Provides examples for current input at AI2 and voltage input at AI3 for frequency reference.
Shows PID control function block diagrams and PID reference/feedback setting channels.
Details F0-07 settings for final frequency reference selection and calculation methods.
Describes different start modes for the AC drive, including direct start and catching a spinning motor.
Details catching a spinning motor, pre-excited start, and SVC quick start modes.
Explains stop modes like decelerate to stop and coast to stop, including DC injection braking settings.
Details acceleration/deceleration time parameters and describes acceleration/deceleration modes.
Explains motor auto-tuning methods (static 1, dynamic, static 2) and their applications.
Details the steps for dynamic auto-tuning and static auto-tuning 2, including notes on parameter input.
Introduces control performance aspects, starting with V/F curve settings.
Describes linear V/F curve, user-defined multi-point V/F curve, and variable-torque square V/F curve.
Explains how current limit control works during acceleration, running, and deceleration.
Covers voltage limit functions and braking unit application for preventing overvoltage.
Details speed loop PI parameters and explains how they affect system response.
Covers torque limit function for system protection in speed or torque control.
Introduces protection functions for the AC drive and motor, starting with motor overload protection.
Details motor overload protection parameters (F9-00, F9-01, F9-02) and inverse time-lag characteristics.
Explains input and output phase loss protection parameters.
Covers auto reset times, DO action during auto reset, and delay of auto reset.
Details how to select action modes for different fault types.
Explains motor overheat protection settings using temperature sensors.
Describes the power dip ride-through function for continuous operation during momentary power loss.
Explains load lost protection function parameters.
Describes Modbus-RTU protocol application, bus structure, and data format.
Explains selection of braking resistor resistance and power, and provides typical braking frequencies for applications.
Details CE mark implications, European standards, and Low Voltage Directive compliance.
Covers fuse installation, foreign object prevention, grounding, and EMC guidelines compliance.
Explains de-rating based on carrier frequency, ambient temperature, and altitude.
Provides detailed safety information and warnings for daily inspection.
Discusses wearing components, their service life, possible causes of failure, and judging criteria.
Provides essential safety information and warnings for troubleshooting.
Offers solutions for problems in open-loop vector control, including torque/speed response and motor oscillation.
Continues troubleshooting for open-loop vector control and covers issues in V/F control like motor oscillation and overcurrent.
Details methods for resetting faults via DI terminal, operating panel, automatic reset, and host computer.
Covers troubleshooting for overvoltage and undervoltage conditions.
Troubleshoots encoder faults, motor overspeed, motor overtemperature, and braking unit overload.
Provides troubleshooting for issues like no display, motor not rotating, DI terminals disabled, and speed errors.
Covers troubleshooting for overcurrent/overvoltage detection and pre-charge relay faults.
Lists Fault and Protection (Group F9) parameters.
