Driving your vehicle
1406
Lane Following Assist (LFA)
trol is operating, and the function will
not decelerate the vehicle.
僅 If the driver accelerates and releases
the accelerator pedal whilst Naviga
-
tion-based Smart Cruise Control is
operating, the vehicle may not decel
-
erate sufficiently or may rapidly
decelerate to a safe speed.
僅 If the curve is too large or too small,
Navigation-based Smart Cruise Con
-
trol may not operate.
僅 The speed information on the cluster
and navigation may differ.
僅 The time gap could occur between
the navigation's guidance and when
Navigation-based Smart Cruise Con
-
trol operation starts and ends.
僅 Even if you are driving at a speed
lower than Smart Cruise Control set
speed, acceleration may be limited by
the curve sections ahead.
僅 If Navigation-based Smart Cruise
Control is operating whilst leaving the
main road to enter an interchange,
junction, rest area, etc., the function
may operate for a certain period of
time.
僅 Deceleration by Navigation-based
Smart Cruise Control may feel it is not
sufficient due to road conditions such
as uneven road surfaces, narrow
lanes, etc.
Lane Following Assist (LFA) (if
equipped)
Lane Following Assist is designed to help
detect lane markings and/or vehicles on
the road, and assists the driver's steering
to help keep the vehicle between lanes.
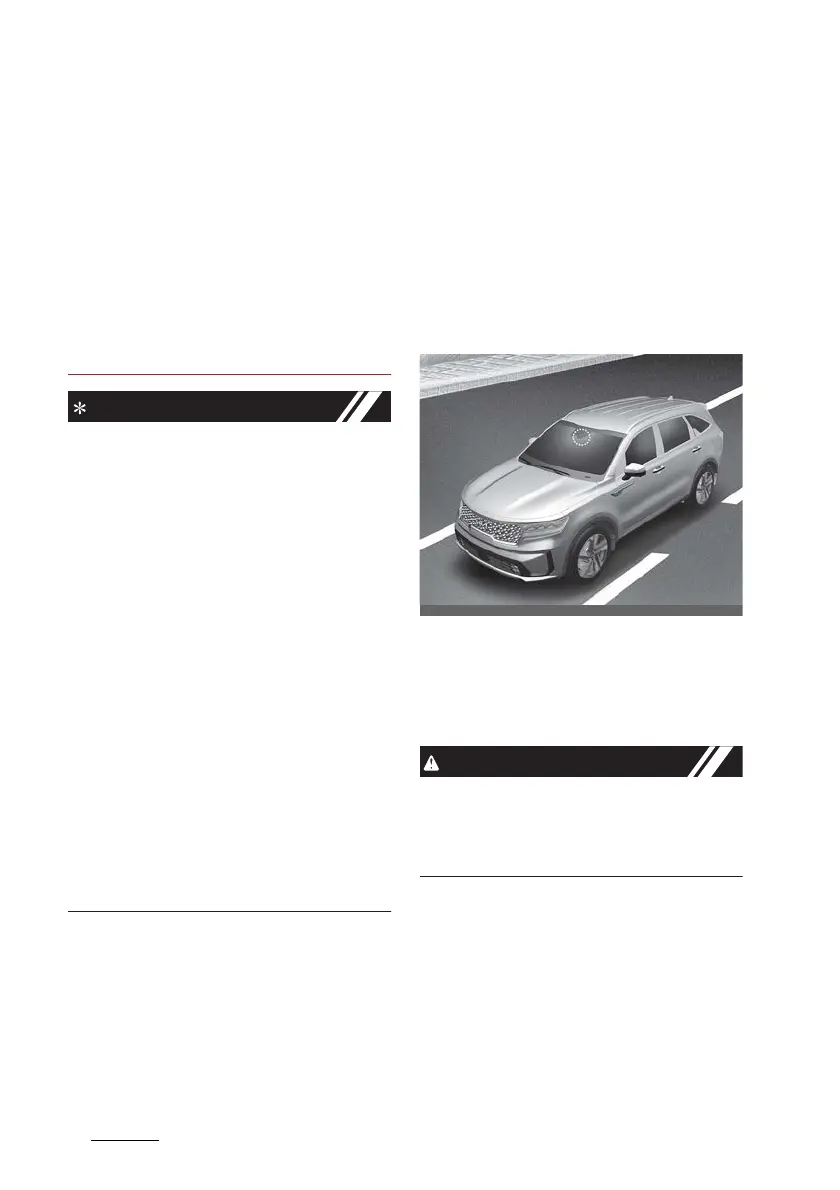
Detecting sensor
Front view camera
The front view camera is used as a
detecting sensor to detect lane markings
and front vehicles.
Refer to the picture above for the
detailed location of the detecting sensor.
For more details on the precautions of
the front view camera, refer to "Forward
Collision-Avoidance Assist (FCA) (Sen
-
sor fusion) (if equipped)" on page 6-64.

 Loading...
Loading...








