4. PARAMETERS FOR POSITIONING CONTROL
4 − 24
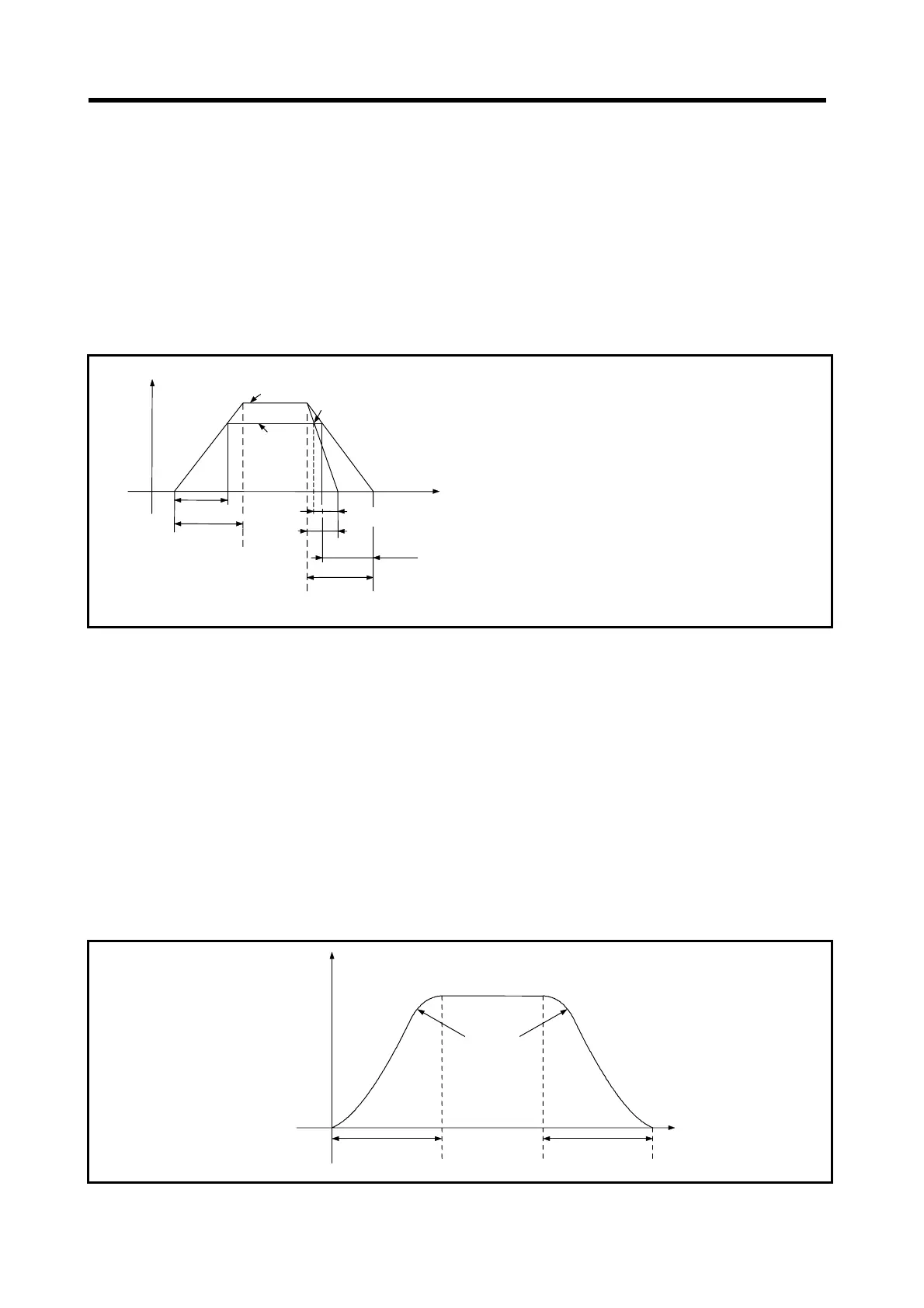
4.4.1 Relationships among the speed limit value, acceleration time, deceleration time, and rapid stop
deceleration time
The speed limit value is the maximum speed during positioning/zeroing.
The acceleration time is the time taken to reach the set speed limit value from the
start of positioning.
The deceleration time and rapid stop deceleration time are the time taken to effect
a stop from the set speed limit value.
Accordingly, the actual acceleration time, deceleration time, and rapid stop
deceleration time are faster, because the positioning speed is faster than the
speed limit value.
1) Actual acceleration time
Time take to reach the positioning speed
set in the servo program
2) Actual rapid stop deceleration time
Time taken to effect a rapid stop from the
positioning speed set in the servo program
3) Actual deceleration time
Time taken to stop from the positioning
speed set in the servo program
Set deceleration time
Speed
Speed limit value
Occurrence of rapid stop cause
Time
Set rapid stop
deceleration
time
3) Actual deceleration time
Set acceleration
time
1) Actual accele-
ration time
2) Actual rapid stop
deceleration time
Positioning
speed set in
the servo
program
Fig. 4.2 Relationships among the Speed Limit Value, Acceleration Time,
Deceleration Time, and Rapid Stop Deceleration Time
4.4.2 S-curve ratio
The S-curve ratio used when S-pattern processing is used as the acceleration and
deceleration processing method can be set. (For details on S-pattern processing,
see Section 7.1.7.)
The setting range for the S-curve ratio is 0 to 100 (%).
If a setting that is outside the applicable range is made, an error occurs on starting,
and control is executed with the S-curve ratio set at 100%.
Errors are set in the servo program setting error area (D9190).
Setting an S-curve ratio enables acceleration and deceleration processing to be
executed gently.
The graph for S-pattern processing is a sine curve, as shown below.
V
t
0
Sine curve
Acceleration
time
Deceleration
time
Positioning speed
Time

 Loading...
Loading...





